Kwalifikacja: ELE.01 - Montaż i obsługa maszyn i urządzeń elektrycznych
Zawód: Elektromechanik
Kategorie: Obwody elektryczne Maszyny i urządzenia elektryczne Rysunek techniczny i dokumentacja
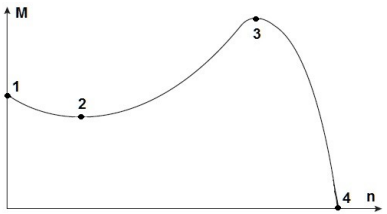
Na rysunku przedstawiono charakterystykę mechaniczną trójfazowego silnika indukcyjnego. W którym z zaznaczonych punktów prędkość obrotowa wirnika jest równa prędkości pola wirującego?
Odpowiedzi
Informacja zwrotna
Punkt oznaczony jako 4 na wykresie przedstawia sytuację, w której prędkość obrotowa wirnika jest równa prędkości pola wirującego, czyli osiągamy tak zwany synchroniczny obrót silnika. W praktyce oznacza to, że poślizg silnika wynosi zero, co jest rzadko spotykane w rzeczywistych zastosowaniach, ale stanowi ważny punkt odniesienia w teorii maszyn elektrycznych. Prędkość synchroniczna jest kluczowa, gdyż określa maksymalną prędkość, jaką może osiągnąć silnik przy danym zasilaniu. Jest to także odniesienie do standardów branżowych, które pomagają w projektowaniu systemów napędowych z uwzględnieniem efektywności energetycznej i dynamiki działania. W aplikacjach przemysłowych, takich jak linie montażowe, gdzie precyzyjna kontrola prędkości jest kluczowa, zrozumienie, kiedy silnik osiąga prędkość synchroniczną, pomaga w optymalizacji procesów produkcyjnych i minimalizacji zużycia energii. Moim zdaniem, mimo że w praktyce silniki często pracują w warunkach niesynchronicznych, to świadomość, kiedy te warunki mogą być zbliżone, jest nieoceniona dla inżynierów projektujących systemy napędowe.