Kwalifikacja: ELM.04 - Eksploatacja układów automatyki przemysłowej
Zawód: Technik automatyk
Kategorie: Układy sterowania Regulacja i automatyka
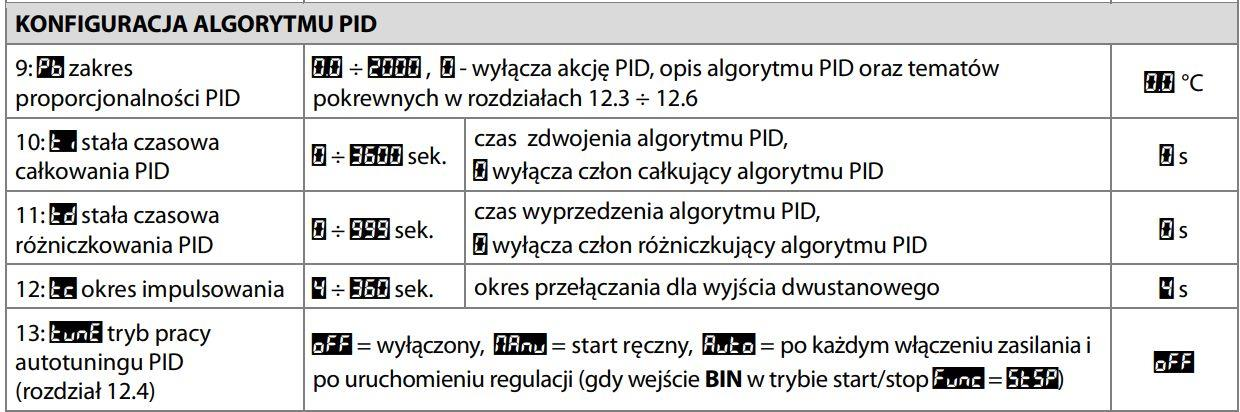
Na podstawie fragmentu dokumentacji technicznej regulatora cyfrowego PID można wywnioskować, że
Odpowiedzi
Informacja zwrotna
W regulacji PID, człon całkujący (I) odpowiada za eliminację uchybu ustalonego, czyli dąży do tego, by na wyjściu układu nie było trwałego odchylenia od wartości zadanej. W dokumentacji wyraźnie widać, że stała czasowa całkowania PID, czyli ten właśnie człon I, może być ustawiana w zakresie od 0 do 3600 sekund. Możliwość tak szerokiej regulacji pozwala dopasować reakcję regulatora do bardzo wolnych procesów przemysłowych, gdzie czas akumulacji odchyłki ma kluczowe znaczenie. Przykładowo, w piecach przemysłowych lub dużych systemach grzewczych, czas całkowania rzędu kilkuset czy nawet kilku tysięcy sekund pozwala uniknąć oscylacji i zapewnić stabilną regulację. Moim zdaniem, zbyt krótka stała całkowania prowadzi często do nadmiernego 'przesterowania' i niestabilności, dlatego tak szeroki zakres jest naprawdę przydatny. Z doświadczenia wiem, że dobranie prawidłowej wartości tego parametru wymaga nie tylko znajomości procesu, ale też pewnej wprawy i testów praktycznych. Warto pamiętać, że według praktyk branżowych, człon I powinien być dobierany ostrożnie, a przy pierwszym uruchomieniu często stosuje się metody autotuningu, które również tu są dostępne (widać to w dokumentacji). Dobrze też zwrócić uwagę na to, że 0 sekund wyłącza całkowanie, co bywa przydatne podczas testów. Takie podejście do konfiguracji PID jest zgodne z zaleceniami producentów i standardami automatyki przemysłowej.