Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne
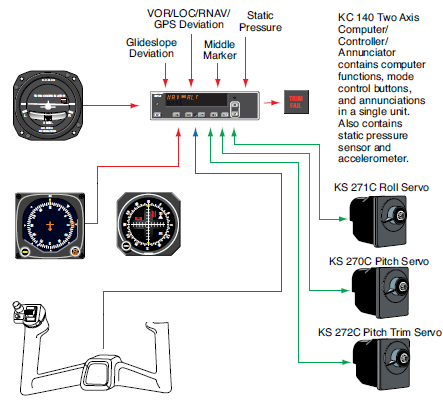
Której funkcji na pewno nie realizuje autopilot o konfiguracji przedstawionej na rysunku.
Odpowiedzi
Informacja zwrotna
Poprawnie wskazana odpowiedź „Damping Dutch roll mode” odnosi się do funkcji, której ten konkretny autopilot po prostu nie ma jak zrealizować. Na schemacie widać typowy dwukanałowy autopilot ogólnego przeznaczenia (tu w stylu Bendix/King KAP/KC 140) z serwami: KS 271C Roll Servo, KS 270C Pitch Servo i KS 272C Pitch Trim Servo. To są serwomechanizmy osi przechyłu i pochylenia oraz trymu wysokości. Brakuje osobnego yaw servo, czyli serwa w osi odchylenia. A właśnie do aktywnego tłumienia Dutch roll (kołysania przechył–odchylenie) potrzebne jest sterowanie sterem kierunku i odpowiedni kanał yaw damper. Taka funkcja występuje raczej w większych samolotach komunikacyjnych lub biznes jetach, gdzie mamy osobny yaw damper channel zgodny np. z wymaganiami FAR/CS-25. W lekkich GA, z takim układem jak na rysunku, autopilot może co najwyżej pasywnie „znieść” niewielkie oscylacje, ale nie ma sprzętowych środków, żeby je aktywnie tłumić. Pozostałe widoczne funkcje wynikają z podłączeń. Z kursomierzem/HSI i sygnałem heading bug autopilot może realizować tryb heading select i heading hold – pilot nastawia kurs, a autopilot odpowiednio steruje roll servo. Z kolei sygnały VOR/LOC/RNAV/GPS i glideslope deviation plus wejście ze statycznego ciśnienia i akcelerometru pozwalają na precyzyjne prowadzenie w osi podłużnej i poprzecznej, w tym koordynację zakrętu poprzez odpowiednie wychylenia lotek i steru wysokości tak, żeby prędkość i przechylenie były właściwie dobrane. Funkcja control wheel steering polega na tym, że pilot ręcznie przestawia drążek/kierownicę, a autopilot „zapamiętuje” nowe zadane parametry (np. pitch, roll) i dalej je utrzymuje – w tym układzie jest to typowa opcja i wynika z obecności serw w obu osiach oraz komputera KC 140 z przyciskami na wolancie. Podsumowując: bez kanału yaw i serwa na sterze kierunku nie ma szans na prawdziwy damping Dutch roll; pozostałe trzy funkcje są zgodne z typową konfiguracją dwukanałowego autopilota GA i w praktyce są intensywnie używane w codziennych operacjach IFR i VFR zgodnie z zaleceniami producenta i dobrymi praktykami operacyjnymi.