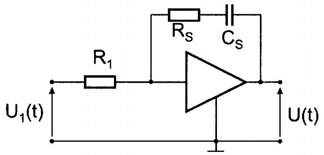
Na schemacie widać wzmacniacz operacyjny z klasyczną pętlą sprzężenia zwrotnego: w gałęzi sprzężenia jest szeregowo połączony rezystor Rs i kondensator Cs, a w torze wejściowym występuje rezystor R1. Taka struktura realizuje regulator proporcjonalno–całkujący, czyli PI. Składowa proporcjonalna wynika z rezystancji Rs – dla wyższych częstotliwości kondensator ma małą impedancję, ale przy analizie odpowiedzi na sygnały robocze w zakresie częstotliwości regulacji uzyskujemy skończone wzmocnienie zależne od stosunku Rs do R1. Składowa całkująca jest realizowana przez kondensator Cs w pętli sprzężenia: dla bardzo niskich częstotliwości rośnie impedancja pojemności, co powoduje, że regulator „zbiera” uchyb w czasie i dąży do jego wyeliminowania (błąd ustalony w stanie stacjonarnym dąży do zera). W praktycznych układach automatyki lotniczej (np. kanał wysokości autopilota, regulacja prędkości obrotowej generatora, stabilizacja napięcia w zasilaczach awioniki) właśnie regulator PI jest najczęściej stosowanym typem. Umożliwia on kompromis pomiędzy szybkim działaniem (część P) a dokładnością w stanie ustalonym (część I). Standardowe procedury strojenia regulatorów, takie jak Ziegler–Nichols, Cohen–Coon czy modyfikacje stosowane w przemyśle lotniczym, bardzo często zakładają początkowo model PI, bo daje on dobrą stabilność i odporność na zakłócenia przy rozsądnym poziomie wzmocnień. Moim zdaniem warto zapamiętać, że kiedy w pętli sprzężenia wzmacniacza operacyjnego widzisz rezystor połączony z kondensatorem, a na wejściu jest tylko rezystor, to praktycznie zawsze patrzysz na realizację regulatora PI w wersji analogowej.
Schemat z zadania przedstawia klasyczny analogowy regulator zrealizowany na wzmacniaczu operacyjnym, ale łatwo się pomylić, jeśli patrzy się tylko na pojedyncze elementy, a nie na ich funkcję w pętli sprzężenia zwrotnego. Wiele osób widząc kondensator od razu myśli o członie różniczkującym i stąd wybiera odpowiedź D lub PD. To jest typowy błąd: sam kondensator nie mówi jeszcze, czy układ realizuje różniczkowanie, czy całkowanie – decyduje o tym sposób jego włączenia względem wejścia, wyjścia i masy. W regulatorze typu P mielibyśmy wyłącznie rezystory: rezystor w torze wejściowym i rezystor w sprzężeniu zwrotnym. Taki układ daje stałe, proporcjonalne wzmocnienie zależne od stosunku Rf do R1 i nie eliminuje błędu ustalonego. Na rysunku wyraźnie występuje element pojemnościowy Cs w pętli sprzężenia, więc czysty regulator P nie wchodzi w grę. Regulator typu D w wersji idealnej miałby kondensator w torze wejściowym lub w takiej konfiguracji, żeby wyjście było proporcjonalne do pochodnej sygnału wejściowego. W praktyce lotniczej czystego D prawie się nie stosuje, bo jest bardzo wrażliwy na szum i zakłócenia, wzmacnia też wysokie częstotliwości, co jest sprzeczne z dobrymi praktykami projektowania awioniki. W układzie z zadania kondensator jest w pętli sprzężenia z rezystorem szeregowym, co tworzy człon całkujący z ograniczoną dynamiką, a nie człon różniczkujący. Z kolei regulator PD łączy część proporcjonalną z różniczkującą, ale w takim układzie kondensator zwykle jest włączony tak, by reagować na szybkie zmiany sygnału (pochodną), a nie gromadzić uchyb w czasie. Tu mamy odwrotną sytuację: konfiguracja powoduje, że przy długotrwałym uchybie kondensator ładuje się i wymusza korekcję aż do zniknięcia błędu statycznego, co jest typowe dla członu całkującego I. Z mojego doświadczenia największy problem polega na tym, że wielu uczniów nie analizuje impedancji elementów w funkcji częstotliwości i nie patrzy, jak zmienia się charakterystyka amplitudowo–fazowa. W praktyce przy projektowaniu regulatorów do autopilotów, serwomechanizmów klap czy stabilizacji napięcia generatorów stosuje się głównie PI właśnie w takiej topologii sprzężenia. Dlatego poprawna interpretacja tego schematu to regulator PI, a wszystkie pozostałe odpowiedzi wynikają z nadmiernego uproszczenia: "jest kondensator, więc to D" albo "są tylko rezystory widoczne na pierwszy rzut oka, więc P". To niestety zbyt powierzchowne podejście.