Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Pomiary i czujniki Elementy i układy elektroniczne
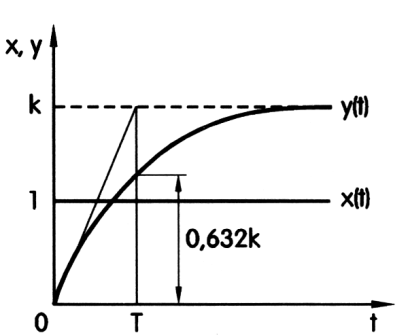
Na rysunku przedstawiono odpowiedź y(t) na wymuszenie skokowe x(t) członu
Odpowiedzi
Informacja zwrotna
Na wykresie widać klasyczną odpowiedź skokową członu inercyjnego pierwszego rzędu. Wejście x(t) to skok jednostkowy (w tym rysunku od 0 do 1), a wyjście y(t) narasta wykładniczo i asymptotycznie zbliża się do wartości k. Kluczowy szczegół to zaznaczenie chwili T, dla której odpowiedź osiąga około 0,632·k – to dokładnie definicja stałej czasowej członu inercyjnego pierwszego rzędu. Dla takiego członu o transmitancji G(s)=k/(Ts+1) odpowiedź na skok jednostkowy ma postać y(t)=k·(1−e^{−t/T}). Jeśli wstawisz t=T, dostajesz y(T)=k·(1−e^{−1})≈0,632·k, czyli dokładnie to, co jest na rysunku. Moim zdaniem to jeden z tych wykresów, które dobrze jest po prostu „mieć w głowie”, bo pojawia się wszędzie: w elektronice (filtr RC, odpowiedź wzmacniacza z ograniczonym pasmem), w automatyce (model prostego układu cieplnego, opóźnienie inercyjne siłowników), ale też w typowych czujnikach stosowanych w lotnictwie. W praktyce, gdy analizujesz np. powolną reakcję wskaźnika lub systemu pomiarowego, patrzysz właśnie na jego człon inercyjny i jego stałą czasową – im większe T, tym wolniejszy układ i bardziej „mułowata” reakcja. Dobra praktyka w projektowaniu torów pomiarowych i sterowania jest taka, żeby znać stałe czasowe kluczowych elementów i świadomie dobierać filtry, wzmacniacze i algorytmy tak, by cały tor miał akceptowalną dynamikę. W diagnostyce też często z odpowiedzi skokowej szacuje się T i k, żeby zbudować prosty model obiektu i sprawdzić, czy zachowuje się zgodnie z dokumentacją producenta.