Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne Pomiary i czujniki
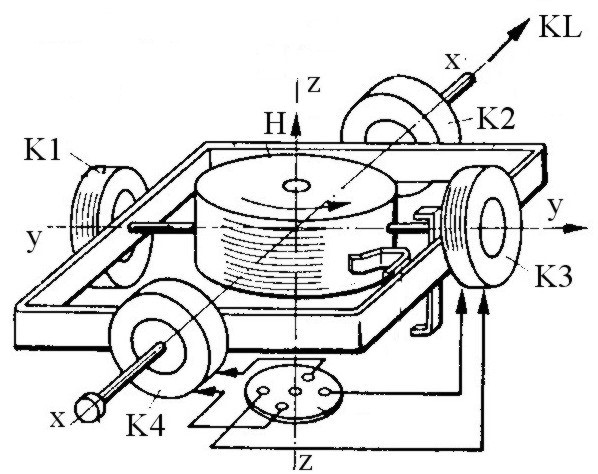
Na rysunku przedstawiono pion giroskopowy (z uwzględnieniem korekcji grawitacyjnej) współpracujący ze wskaźnikiem sztucznego horyzontu. Która z maszyn elektrycznych jest selsynem nadajnikiem kąta pochylenia samolotu?
Odpowiedzi
Informacja zwrotna
Prawidłowo wskazany został K1 – to właśnie ta maszyna pełni rolę selsyna nadajnika kąta pochylenia (pitch) w pionie żyroskopowym ze sztucznym horyzontem. W tego typu układach mamy zwykle kilka maszyn synchronicznych: jedna odpowiada za przechylenie (roll), inna za pochylenie (pitch), czasem kolejna za kurs albo inne korekcje. Na rysunku K1 jest zlokalizowana na osi związanej z ruchem pochylenia ramy z żyroskopem. To jest klucz: selsyn nadajnik musi być mechanicznie sprzęgnięty z tą osią, której kąt ma mierzyć i przekazywać na wskaźnik. Dlatego K1 siedzi dokładnie na osi y, która opisuje pochylenie samolotu względem horyzontu. W praktyce, gdy samolot unosi nos do góry lub opuszcza go, rama żyroskopu odchyla się wokół tej osi, a wirnik K1 obraca się o kąt proporcjonalny do kąta pitch. Sygnał trójfazowy z uzwojeń stojana K1 jest następnie przesyłany do selsyna odbiornika we wskaźniku sztucznego horyzontu, gdzie następuje wierne odtworzenie tego kąta przez odpowiedni obrót tarczy lub maski horyzontu. Takie rozwiązanie jest zgodne z klasycznymi standardami budowy przyrządów żyroskopowych stosowanych w lotnictwie (zarówno według starych norm ICAO, jak i praktyk stosowanych w DO-160/DO-178 w części dotyczącej awioniki analogowej). Moim zdaniem ważne jest też to, że selsyn jako nadajnik zapewnia galwaniczną separację między czujnikiem a wskaźnikiem i bardzo stabilne, liniowe odwzorowanie kąta, co w eksploatacji przyrządów pokładowych jest po prostu złotym standardem – szczególnie w starszych samolotach bez pełnego EFIS. W obsłudze technicznej typową procedurą jest sprawdzenie, czy przy zadanym mechanicznym wychyleniu osi pochylenia obrót wału K1 i wskazanie sztucznego horyzontu są zgodne w dopuszczalnej tolerancji, co pokazuje, jak istotna jest rola właśnie tego konkretnego selsyna.