Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne Pomiary i czujniki Elementy i układy elektroniczne
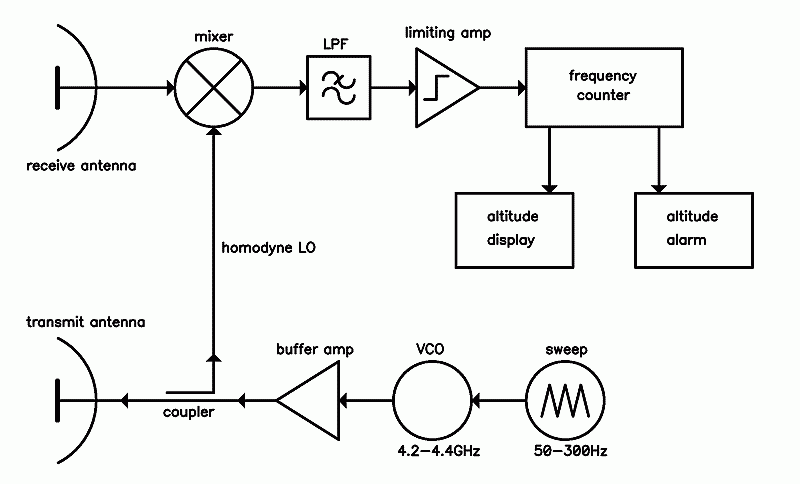
Na rysunku przedstawiono schemat budowy
Odpowiedzi
Informacja zwrotna
Na schemacie widać klasyczny blokowy układ radiowysokościomierza FMCW (frequency modulated continuous wave). Mamy nadajnik z generatorem VCO pracującym w paśmie około 4,2–4,4 GHz, do tego tor „sweep” – czyli wolne przestrajanie częstotliwości w zakresie kilkudziesięciu–kilkuset herców. Sygnał z VCO jest wzmacniany w buffer amp, podawany przez sprzęgacz na antenę nadawczą. Część mocy przez coupler trafia też do lokalnego oscylatora homodyne LO w mieszaczu. Druga antena odbiera echo odbite od ziemi, sygnał trafia do mixera, gdzie jest mieszany z sygnałem odniesienia z nadajnika. Po mieszaniu i filtracji w LPF otrzymujemy sygnał różnicowy o częstotliwości proporcjonalnej do czasu powrotu echa, a więc do wysokości nad terenem. Dalej jest wzmacniacz ograniczający (limiting amp), który formuje przebieg o stałej amplitudzie, odpowiedni do dokładnego zliczania częstotliwości. Frequency counter przelicza częstotliwość tego sygnału na wartość wysokości i przekazuje ją do wskaźnika wysokości (altitude display) oraz do układu ostrzegania (altitude alarm). W praktyce radiowysokościomierz tego typu pracuje zgodnie z wymaganiami norm lotniczych, np. RTCA DO‑155, i jest kluczowy przy podejściach precyzyjnych, przy lotach na małych wysokościach oraz w systemach EGPWS/TAWS. Moim zdaniem warto zapamiętać, że obecność dwóch anten, pracy ciągłej w paśmie 4,2–4,4 GHz, toru mieszacza i licznik częstotliwości jednoznacznie wskazuje na radiowysokościomierz, a nie na klasyczny radar impulsowy czy DME.