Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne
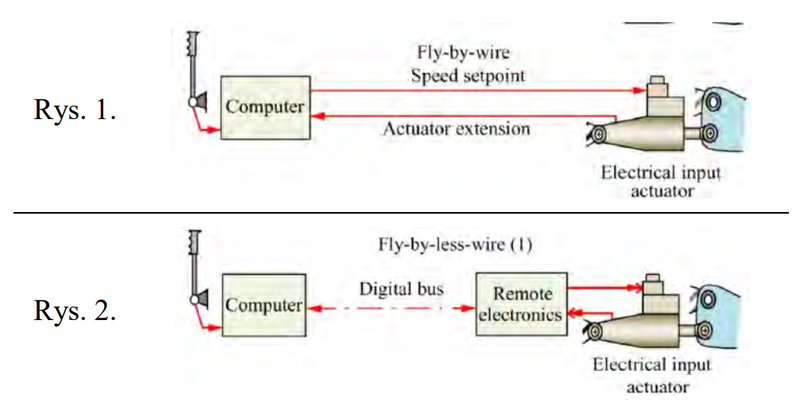
O ile w przybliżeniu zredukowano masę układu sterowania dużego pasażerskiego samolotu przy przejściu z techniki przedstawionej na rys. 1 (np. samolot A.300 B, rok produkcji 1974, masa własna 79 000 kg) do techniki przedstawionej na rys. 2 (np. A320, rok produkcji 1987, masa własna 40 835)?
Odpowiedzi
Informacja zwrotna
Prawidłowo przyjęto redukcję masy układu sterowania rzędu 500 kg. Wynika to z przejścia z klasycznego fly‑by‑wire, gdzie z komputera do wykonawczych siłowników prowadzone są liczne, stosunkowo ciężkie wiązki przewodów sygnałowych i zasilających, do architektury „fly‑by‑less‑wire”, w której większość sygnałów przesyłana jest wspólną magistralą cyfrową, a inteligencja sterowania przeniesiona jest do elektroniki lokalnej przy siłowniku. W dużym samolocie pasażerskim takich kanałów sterowania są dziesiątki, do tego dochodzi redundancja, ekranowanie, okablowanie rezerwowe, wiązki przechodzą przez całe kadłuby i skrzydła. Każdy metr grubego, ekranowanego przewodu waży zauważalnie, a w skali całego płatowca zbiera się z tego kilkaset kilogramów. Redukcja o około 500 kg jest więc jak najbardziej realistyczna i zgodna z danymi eksploatacyjnymi oraz analizami producentów. Z mojego doświadczenia wynika, że w nowoczesnych konstrukcjach bardzo świadomie „poluje się” na każdy kilogram w systemach awionicznych, bo bezpośrednio przekłada się to na mniejsze zużycie paliwa, większy zasięg i lepsze osiągi. Lżejszy system sterowania to także prostsze trasy wiązek, mniej przepustów, krótszy czas montażu i obsługi, a co za tym idzie – niższe koszty cyklu życia statku powietrznego. W standardach projektowych (np. DO‑160, ARP4754, ARINC) mocno podkreśla się integrację funkcji i cyfrową transmisję danych właśnie po to, by ograniczać liczbę przewodów, złożoność instalacji oraz masę. W praktyce technik obsługujący taki samolot ma mniej ciężkich wiązek do inspekcji, łatwiejszy dostęp do LRU i bardziej przejrzystą diagnostykę, bo wiele parametrów jest przesyłanych po magistrali i dostępnych w systemach testowych lub w FMS/EICAS. Ta odpowiedź dobrze oddaje typową, realną skalę korzyści masowych przy przejściu na nowocześniejsze rozwiązania fly‑by‑less‑wire.