Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne Pomiary i czujniki Podstawy fizyki lotniczej
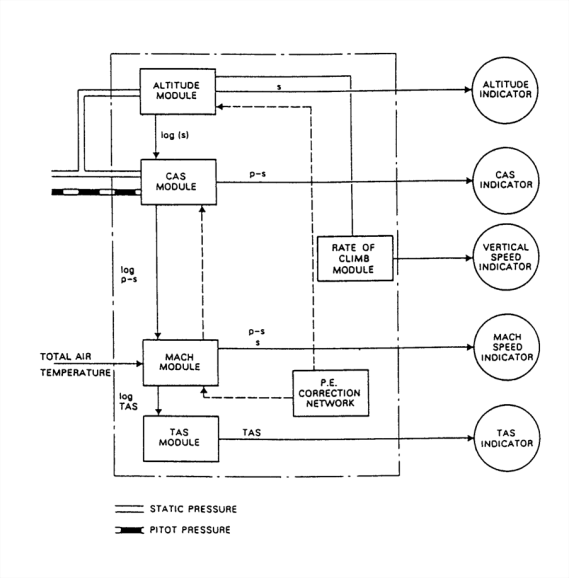
W przedstawionej na rysunku centrali aerodynamicznej /ADC/ wyliczana jest prędkość pionowa /VS/ samolotu w torze pomiaru
Odpowiedzi
Informacja zwrotna
W centrali aerodynamicznej (ADC – Air Data Computer) prędkość pionowa VS jest obliczana na podstawie zmian wysokości, czyli z toru pomiaru wysokości, opartego wyłącznie na ciśnieniu statycznym. Na schemacie widać, że moduł ALTITUDE MODULE korzysta z ciśnienia statycznego, a następnie jego sygnał (często z odpowiednim opóźnieniem i filtracją – tzw. log(s), filtry czasowe) jest przekazywany do modułu RATE OF CLIMB MODULE, który właśnie generuje sygnał VS. W uproszczeniu: ADC śledzi, jak szybko zmienia się wysokość barometryczna w funkcji czasu i z tego wyznacza prędkość wznoszenia/opadania w ft/min czy m/s. To jest zgodne z praktyką przemysłową i dokumentacją producentów, np. Rockwell Collins, Honeywell czy Thales – wszędzie VS jest funkcją pochodnej wysokości barometrycznej, a nie np. IAS czy TAS. Moim zdaniem ważne jest, żeby kojarzyć, że klasyczny wariometr barometryczny również działa dokładnie tak samo: mierzy tempo zmian ciśnienia statycznego, tylko w wersji analogowej (przez dławik i komorę referencyjną). ADC robi to cyfrowo – przetworniki ciśnienia, filtracja, obliczenie dh/dt i przesłanie po ARINC 429 albo innej magistrali do wskaźnika VSI/EFIS. W praktyce pilot patrząc na VS widzi więc, jak szybko zmienia się jego wysokość barometryczna, a nie np. prędkość względem mas powietrza. To ma znaczenie przy podejściach precyzyjnych, utrzymywaniu stałego profilu zniżania, pracy autopilota w trybie VS oraz przy analizie osiągów w climb/cruise/descent. Dobrą praktyką jest pamiętać, że wszelkie błędy w torze wysokości (np. złe nastawienie QNH, błędy ciśnienia statycznego) będą się też w mniejszym lub większym stopniu odbijały na wskazaniu VS, bo obie wielkości są z tego samego toru pomiarowego.