Kwalifikacja: ELM.05 - Eksploatacja urządzeń elektronicznych
Zawód: Technik elektronik
Kategorie: Układy elektroniczne Bezpieczeństwo i eksploatacja
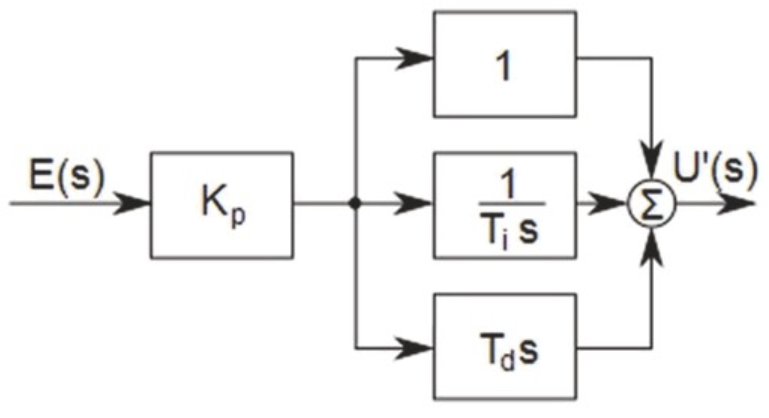
Który człon nie występuje w strukturze idealnego regulatora PID?
Odpowiedzi
Informacja zwrotna
Regulator PID (Proporcjonalno-Integralno-Różniczkujący) jest fundamentalnym narzędziem w automatyce i regulacji procesów. Składa się z trzech kluczowych członów: proporcjonalnego, całkującego oraz różniczkującego. Człon proporcjonalny odpowiada za reakcję regulatora na bieżący błąd, całkujący kumuluje błąd w czasie, co pozwala na eliminację błędów ustalonych, a różniczkujący przewiduje przyszłe zachowanie błędu na podstawie jego zmian. W kontekście idealnego regulatora PID, człon "pamiętający" nie występuje, co jest zgodne z definicją i standardami regulacji. Przykładowo, w zastosowaniach przemysłowych, takich jak sterowanie temperaturą w piecach czy ciśnieniem w zbiornikach, precyzyjna regulacja za pomocą PID jest kluczowa dla stabilności procesów. Ostatecznie, znajomość i zrozumienie tych podstawowych członów regulatora PID pozwala na ich skuteczne zastosowanie w praktycznych sytuacjach, co jest fundamentalnym aspektem dla inżynierów automatyki.