Kwalifikacja: ELE.02 - Montaż, uruchamianie i konserwacja instalacji, maszyn i urządzeń elektrycznych
Zawód: Technik elektryk
Kategorie: Maszyny i urządzenia elektryczne
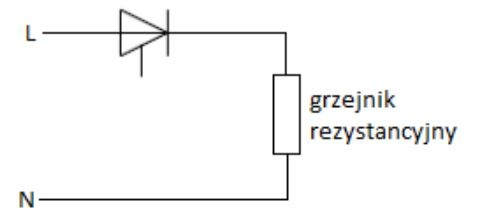
W celu przeprowadzania regulacji wydzielanego ciepła od zera do wartości maksymalnej z grzejnika, w układzie przedstawionym na schemacie, należy płynnie nastawiać kąt opóźnienia załączenia tyrystora rozpoczynając od
Odpowiedzi
Informacja zwrotna
Prawidłowo – w takim układzie regulacji mocy grzejnika rezystancyjnego zasilanego z sieci AC kąt opóźnienia załączenia tyrystora zmieniamy od π rad do 0 rad. Chodzi o klasyczną regulację fazową. Sieć ma przebieg sinusoidalny, a tyrystor przewodzi dopiero od chwili, gdy dostanie impuls bramkowy. Jeżeli włączymy go bardzo późno w danej połówce sinusoidy, czyli blisko π rad (180°), to przewodzi tylko krótki „ogon” napięcia, przez co średnia moc na grzejniku jest mała – praktycznie bliska zeru. Wraz ze zmniejszaniem kąta opóźnienia od π w stronę 0 tyrystor załącza się coraz wcześniej, więc przez większą część połówki sinusoidy grzejnik jest zasilany. Średnia wartość napięcia skutecznego rośnie, a z nią moc wydzielana w rezystorze (P≈U²/R). Dla α=0 rad tyrystor przewodzi całą dodatnią połówkę i moc jest maksymalna dla danego układu. Z praktycznego punktu widzenia taka regulacja fazowa jest typowa w prostych regulatorach mocy do grzałek, lutownic, suszarek, czy nawet prostych regulatorów temperatury w nagrzewnicach. W urządzeniach zgodnych z normami, np. PN-EN 60730 czy PN-EN 60335, dba się o to, by tyrystor i elementy sterujące były odpowiednio dobrane do prądów obciążenia oraz żeby ograniczyć zakłócenia EMC – stosuje się filtry, dławiki, czasem układy miękkiego startu. Warto też pamiętać, że grzejnik rezystancyjny jest obciążeniem liniowym i bardzo „wdzięcznie” współpracuje z regulacją fazową, w przeciwieństwie do urządzeń indukcyjnych, gdzie sterowanie kątem załączenia wymaga ostrożniejszego podejścia. Moim zdaniem to jedno z podstawowych zagadnień, które każdy elektryk powinien mieć dobrze „w palcu”, bo później wraca w różnych odmianach przy sterowaniu mocą.