Kwalifikacja: MEC.03 - Montaż i obsługa maszyn i urządzeń
Zawód: Technik mechanik
Kategorie: Budowa maszyn Pomiary i tolerancje
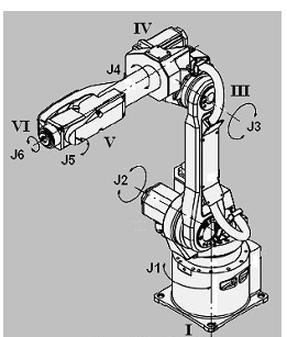
Iloma stopniami swobody w sumie dysponują elementy robota przemysłowego przedstawionego na rysunku?
Odpowiedzi
Informacja zwrotna
Odpowiedź "6 - tylko ruchy obrotowe" jest trafna, bo w tym robocie przemysłowym można zauważyć sześć osi ruchu, które odpowiadają za ruchy obrotowe. Te osie, od J1 do J6, dają robotowi możliwość wykonywania różnych zadań w przestrzeni roboczej. W branży, roboty z sześcioma stopniami swobody mogą działać z niesamowitą precyzją, co czyni je super przydatnymi w takich zadaniach jak montaż, spawanie czy malowanie. Warto też wspomnieć, że według standardu ISO 9283 można oceniać wydajność robotów przemysłowych, co podkreśla, jak ważne jest dobranie odpowiednich stopni swobody do konkretnych zastosowań. Rozumienie osi ruchu w robotyce to klucz do efektywnego projektowania i programowania tych maszyn, a potem ich wykorzystania w produkcji.