Kwalifikacja: MEC.05 - Użytkowanie obrabiarek skrawających
Zawód: Technik mechanik
Kategorie: Obrabiarki skrawające Parametry i procesy obróbki
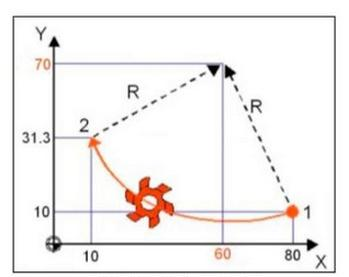
Który fragment programu opisuje ruch narzędzia z punktu 1 do 2?
Odpowiedzi
Informacja zwrotna
Ruch narzędzia z punktu 1 do 2 przedstawiony w odpowiedzi G02 X10 Y31.3 I-20 J60 jest poprawny, ponieważ zgodnie z kodem G02 wykonuje się łuk w kierunku zgodnym z ruchem wskazówek zegara. W tym przypadku, punkt początkowy (X80, Y10) przemieszcza się do punktu końcowego (X10, Y31.3). Znając wartości I i J, które określają przesunięcie środka łuku względem punktu startowego, możemy ocenić, że I=-20 oznacza przesunięcie w lewo, a J=60 oznacza przesunięcie w górę. W praktyce, programowanie CNC wymaga precyzyjnego określenia trajektorii narzędzia, co jest kluczowe dla uzyskania wysokiej jakości elementów. Dobrym przykładem zastosowania kodu G02 jest frezowanie krawędzi, gdzie często korzysta się z łuków, aby osiągnąć gładkie przejścia i estetyczne wykończenie. W standardach ISO 6983 dotyczących programowania CNC, G02 jest jasno zdefiniowane jako ruch po łuku w kierunku zgodnym z ruchem wskazówek zegara, co potwierdza poprawność tej odpowiedzi.