Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: ISOBUS i terminale sterujące Diagnostyka, kalibracja i naprawa
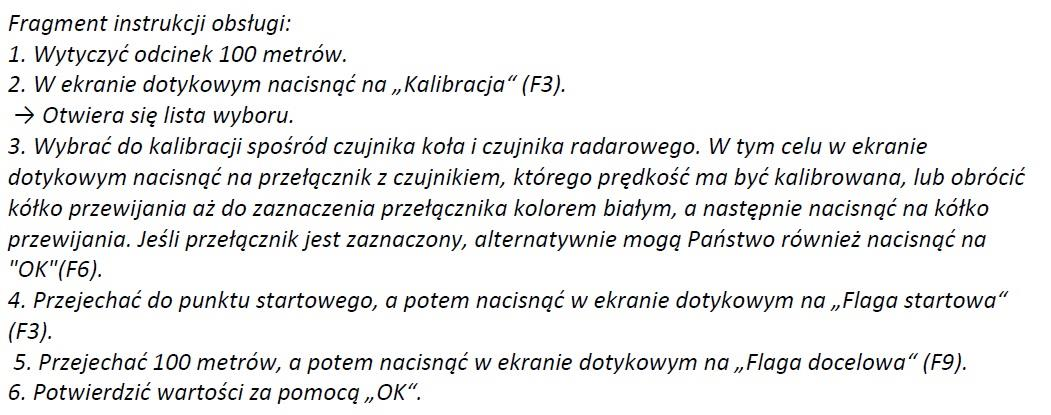
Fragment instrukcji obsługi terminalu ISOBUS CCI 100/200 przedstawia kalibrację
Odpowiedzi
Informacja zwrotna
Poprawna odpowiedź odnosi się do kalibracji prędkości jazdy agregatu, co bardzo dobrze widać w treści instrukcji. Terminal ISOBUS CCI 100/200 korzysta z sygnału prędkości pochodzącego z czujnika koła lub czujnika radarowego. Właśnie dlatego w instrukcji pojawia się wybór między „czujnikiem koła” a „czujnikiem radarowym” oraz konieczność przejechania dokładnie wyznaczonego odcinka 100 metrów. To klasyczna procedura kalibracji prędkości: znany dystans, pomiar czasu i korekta współczynnika impulsów na metr, żeby terminal przeliczał drogę i prędkość możliwie dokładnie. Moim zdaniem to jedna z ważniejszych kalibracji, bo od poprawnego pomiaru prędkości zależy dawka wysiewu, oprysku, praca sekcji, dokumentacja zabiegów, a nawet systemy Section Control czy Task Controller. W praktyce, jeśli czujnik nie jest dobrze skalibrowany, maszyna może np. podawać zbyt mało nawozu przy większej prędkości albo przelewać przy oprysku, co generuje realne koszty i problemy środowiskowe. Dobrą praktyką jest powtarzanie takiej kalibracji po zmianie ogumienia, ciśnienia w oponach, większych naprawach lub gdy rolnik zauważy rozbieżności między prędkością z terminala a prędkością z ciągnika lub GPS. Standardy branżowe i instrukcje większości producentów maszyn precyzyjnych opisują bardzo podobny schemat: wyznaczony odcinek referencyjny, przejazd z równomierną prędkością, oznaczenie punktu startowego i końcowego (tu „Flaga startowa” i „Flaga docelowa”) oraz zapisanie nowej wartości w sterowniku. Tak właśnie działa kalibracja prędkości jazdy w systemach ISOBUS, dlatego wybrana odpowiedź jest trafiona merytorycznie.