Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Nawigacja satelitarna i automatyczne prowadzenie Ekonomika i wydajność pracy
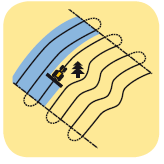
Który schemat prowadzenia agregatu przedstawia ilustracja?
Odpowiedzi
Informacja zwrotna
Na ilustracji pokazano tzw. krzywą adaptacyjną, czyli schemat prowadzenia agregatu, w którym linie przejazdów nie są prostymi równoległymi ścieżkami, tylko dopasowują się do kształtu pola, jego granic, przeszkód czy np. miedz i zadrzewień. System automatycznego prowadzenia, oparty na GNSS, zapisuje jedną linię referencyjną – zwykle pierwszy przejazd wzdłuż brzegu pola – a kolejne ścieżki robocze są generowane jako równoległe krzywe, przesunięte o szerokość roboczą maszyny. Widać to na rysunku: traktor z agregatem porusza się po łukach, które omijają przeszkody i jednocześnie utrzymują stałą odległość między kolejnymi przejazdami. W praktyce takie prowadzenie stosuje się przy nawożeniu, opryskach, uprawie przedsiewnej czy siewie na działkach o nieregularnym kształcie, na przykład przy ciekach wodnych, zadrzewieniach śródpolnych albo przy klinach. Z mojego doświadczenia, krzywa adaptacyjna bardzo ogranicza nakładki i omijaki w narożnikach oraz na polach „powykręcanych”, co realnie przekłada się na mniejsze zużycie paliwa, środków ochrony roślin i nawozów. Producenci systemów prowadzenia (np. w rozwiązaniach typu AutoTrac, GuideLine, Contour lub Adaptive Curve) traktują takie ścieżki jako standard dobrej praktyki na skomplikowanych działkach, bo pozwalają utrzymać dokładność przejazdu rzędu kilku centymetrów nawet przy wielokrotnym wjeździe na to samo pole w różnych zabiegach.