Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Nawigacja satelitarna i automatyczne prowadzenie Czujniki i elementy pomiarowe
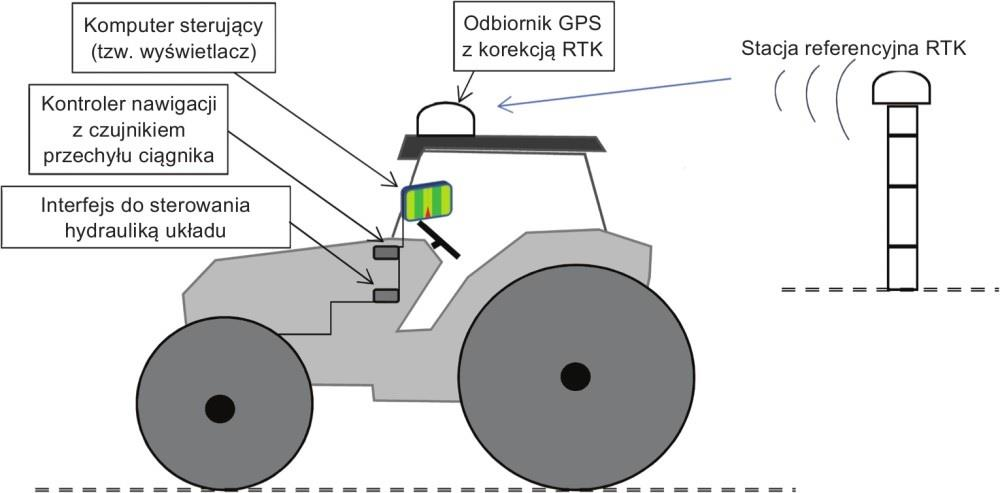
Który system kierowania ciągnikiem pokazano na rysunku?
Odpowiedzi
Informacja zwrotna
Na rysunku pokazano typowy system automatycznego prowadzenia ciągnika, który wpięty jest bezpośrednio w standardowe elementy układu kierowniczego, czyli w hydraulikę skrętu kół. Świadczy o tym opis „Interfejs do sterowania hydrauliką układu” – komputer sterujący nie kręci fizycznie kierownicą przez dodatkowy silnik, tylko wysyła sygnały do zaworów hydraulicznych odpowiedzialnych za skręt. To jest właśnie klasyczny układ „steer‑by‑wire” w wersji rolniczej, ale oparty na fabrycznym orbitrolu i siłownikach skrętu. Odbiornik GPS z korekcją RTK zapewnia bardzo wysoką dokładność toru jazdy (rzędu 2–3 cm), a stacja referencyjna RTK dostarcza sygnał korekcyjny. Kontroler nawigacji z czujnikiem przechyłu ciągnika koryguje błędy wynikające z nierówności terenu, co jest ważne przy pracy na stokach czy pagórkach. W praktyce taki system pozwala wykonywać zabiegi uprawowe, siew, sadzenie, dokładne nawożenie czy opryski z zachowaniem równoległych przejazdów i minimalnych nakładek. Moim zdaniem to obecnie standard w nowoczesnych gospodarstwach, bo ogranicza zmęczenie operatora, poprawia jakość pracy i ułatwia wykorzystanie map aplikacyjnych oraz innych funkcji rolnictwa precyzyjnego. To rozwiązanie jest też lepiej zintegrowane z ciągnikiem niż systemy z dodatkowym silnikiem na kierownicy i zwykle spełnia wymagania producentów co do bezpieczeństwa i niezawodności układu kierowniczego.