Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Czujniki i elementy pomiarowe Diagnostyka, kalibracja i naprawa
Słowa kluczowe: Radarowy czujnik prędkości
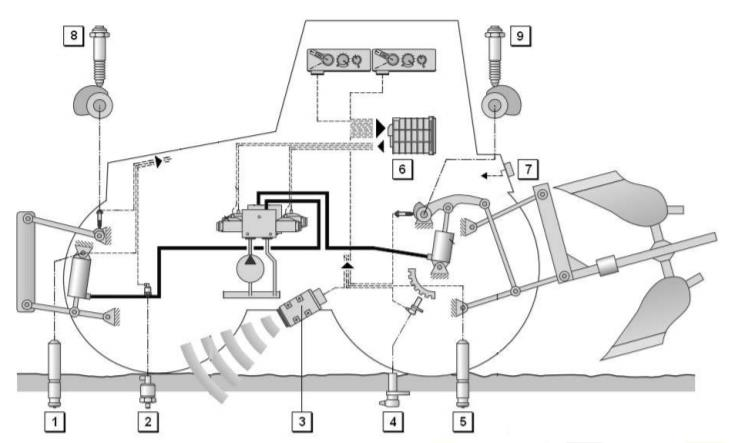
Którym numerem na przedstawionym schemacie oznaczony jest radarowy czujnik prędkości ciągnika rolniczego?
Odpowiedzi
Informacja zwrotna
Poprawna jest odpowiedź „3”, bo numerem 3 na schemacie oznaczono właśnie radarowy czujnik prędkości ciągnika. Widać, że element ten jest umieszczony pod spodem ciągnika, skierowany w stronę powierzchni pola i wysyła charakterystyczną „wiązkę fal” – to typowy sposób rysowania radaru na schematach. Radarowy czujnik prędkości mierzy prędkość względem gruntu, a nie obrotów kół, dzięki czemu unika się błędów wynikających z poślizgu opon, ugniatania gleby czy zmiany średnicy dynamicznej koła. W praktyce ma to ogromne znaczenie przy precyzyjnym sterowaniu podnośnikiem, dawkowaniu nawozów, oprysków czy pracy z ISOBUS-em, bo wszystkie te systemy bazują na realnej prędkości roboczej. Moim zdaniem to jedno z ważniejszych urządzeń pomiarowych w nowoczesnym ciągniku – bez niego trudno mówić o rzetelnej automatyzacji. Producenci maszyn zalecają, żeby radar był poprawnie skalibrowany i czysty, bez warstwy błota, bo wtedy sygnał prędkości jest stabilny, a układy elektroniczne (np. sterownik EHR albo komputer roboczy) mogą poprawnie przeliczać powierzchnię, dawki na hektar i reagować na zmiany warunków pracy. W nowocześniejszych zestawach dane z radaru często są łączone z danymi z GNSS (GPS/RTK), ale wciąż to radar daje bardzo dobrą, bezpoślizgową prędkość chwilową bez opóźnień, co jest szczególnie ważne przy ruszaniu, na uwrociach i przy nierównym terenie.