Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Nawigacja satelitarna i automatyczne prowadzenie Ekonomika i wydajność pracy
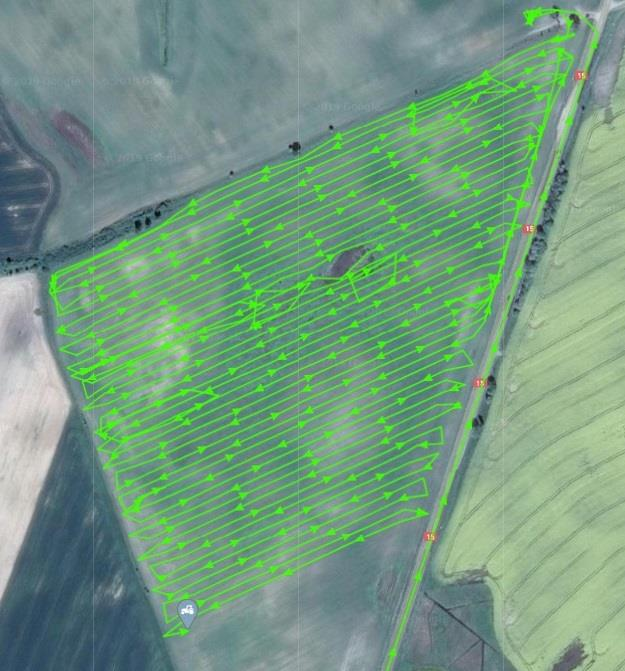
Na ilustracji przedstawiono
Odpowiedzi
Informacja zwrotna
Na ilustracji widzisz zapis przejazdów ciągnika po polu, zarejestrowany przez system nawigacji satelitarnej – charakterystyczne równoległe linie z zaznaczonym kierunkiem jazdy. To typowy ślad pracy ciągnika wyposażonego w GNSS i często także automatyczne prowadzenie (autopilot, jazda równoległa). Program rejestruje realną trajektorię przejazdu, a nie tylko teoretyczne ścieżki, dlatego widać miejsca nawrotów na uwrociach, lekkie odchyłki, czasem korekty toru jazdy. Moim zdaniem to świetny przykład, jak w praktyce wygląda dokumentowanie pracy maszyny. Takie mapy służą później do analizy pokrycia pola, sprawdzenia, czy nie było omijaków ani nakładek, a także do oceny efektywności operatora i systemu prowadzenia. W nowoczesnych gospodarstwach zapis przejazdów wykorzystuje się do tworzenia map aplikacyjnych, planowania kolejnych zabiegów, a nawet do rozliczania usług. Dobrą praktyką jest archiwizowanie takich przejazdów w chmurze producenta terminala lub w programie do zarządzania gospodarstwem, żeby mieć pełną historię zabiegów na danej działce. Widać też, że przejazdy są zaplanowane równolegle do dłuższego boku pola – to klasyczna zasada ograniczania liczby nawrotów i skracania czasu nieproduktywnego. W praktyce operator ustawia linię A–B na terminalu GNSS, a potem ciągnik automatycznie utrzymuje równoległe przejazdy, co zmniejsza zmęczenie i poprawia dokładność zabiegu, np. siewu czy nawożenia.