Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Czujniki i elementy pomiarowe Kombajny i maszyny zbierające ISOBUS i terminale sterujące
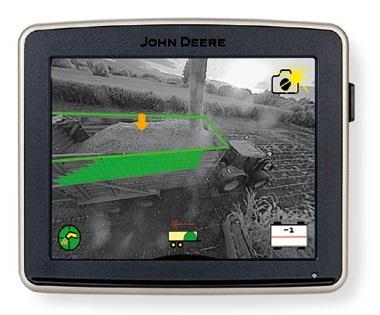
Na podstawie zamieszczonego obrazu z monitora maszyny można stwierdzić, że maszyna ma uruchomiony system
Odpowiedzi
Informacja zwrotna
Na ekranie widać typowy interfejs systemu aktywnej kontroli załadunku – kamera skierowana na przyczepę, zaznaczone zielone linie wyznaczające obrys skrzyni ładunkowej oraz wskaźnik poziomu napełnienia. System mierzy położenie i wysokość pryzmy materiału (np. ziarna czy sieczki) i na bieżąco ocenia, czy ładunek jest równomiernie rozłożony oraz czy nie zbliża się do przepełnienia. W praktyce taki układ współpracuje z czujnikami objętości lub analizą obrazu, a operator dostaje sygnał, kiedy powinien przesunąć zestaw lub zmienić tor jazdy, żeby wykorzystać całą kubaturę przyczepy. W nowocześniejszych rozwiązaniach maszyna potrafi sama korygować kierunek wyrzutu strumienia materiału, tak aby trafiał dokładnie w wolną przestrzeń skrzyni. Moim zdaniem to jeden z bardziej przydatnych systemów w intensywnych zbiorach, bo ogranicza straty z rozsypywania, poprawia bezpieczeństwo na drodze (brak przeładowań i „górek” nad burtą) i przyśpiesza pracę, bo operator mniej się „patrzy w lusterka”, a bardziej kontroluje przebieg zbioru. Dobrą praktyką jest regularna kalibracja kamery i czujników objętości, zgodnie z instrukcją producenta, oraz sprawdzanie poprawności detekcji przy zmianie rodzaju materiału, bo np. ziarno, kukurydza i trawa mają inną strukturę i odbicie światła. W standardach nowoczesnych maszyn rolniczych takie rozwiązania są elementem całego pakietu automatyzacji zbioru, często zintegrowanego z systemami dokumentacji plonów i zarządzania flotą.