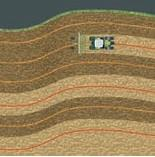
Na ilustracji pokazany jest przejazd prowadzony wzdłuż linii, które dokładnie odwzorowują kształt granicy pola – czyli po konturze, ale jednocześnie w oparciu o wyznaczoną linię A i B. To właśnie jest typowy tryb A‑B konturowy. W praktyce wygląda to tak, że najpierw operator przejeżdża pierwszy raz po brzegu pola, wyznaczając punkt A i punkt B wzdłuż tej nieregularnej krawędzi. Terminal zapisuje tę ścieżkę jako linię referencyjną, a potem system automatycznego prowadzenia generuje kolejne linie równoległe, ale o takim samym „falującym” kształcie jak kontur. Dzięki temu maszyna jedzie równolegle do granicy pola, nawet jeśli pole ma zakola, łuki czy nieregularne krawędzie. Moim zdaniem to jeden z praktyczniejszych trybów na działkach w dolinach rzek, na skarpach czy na polach o nieregularnych zarysach, gdzie klasyczny prosty A‑B byłby mało efektywny. W trybie A‑B konturowym zachowujesz zalety standardowego A‑B (precyzyjne prowadzenie, stała szerokość przejazdów, łatwe wznowienie pracy po przerwie) i jednocześnie dopasowujesz się do geometrii pola. W nawożeniu mineralnym czy oprysku ogranicza to nakładki i omijaki na wąskich klinach oraz przy łukach, poprawia równomierność dawki i zmniejsza zużycie nawozu oraz środków ochrony roślin. Dobre praktyki producentów systemów GNSS (Trimble, John Deere, Topcon, Claas i inni) zalecają właśnie tryb A‑B konturowy na polach o nieregularnym kształcie, szczególnie przy pracy z Section Control i zmiennym dawkowaniem, bo ścieżki robocze są wtedy logiczne, przewidywalne i zgodne z faktycznym kształtem działki.
Na rysunku ścieżki przejazdu wyraźnie „falują” razem z kształtem pola, ale jednocześnie są do siebie równoległe i o stałej szerokości roboczej. To ważna wskazówka, bo odróżnia tryby pracy automatycznego prowadzenia. Często intuicyjnie myśli się, że skoro linie są krzywe, to musi to być po prostu tryb konturowy. W czystym trybie konturowym operator zwykle jedzie po jednej wyznaczonej linii, na przykład wzdłuż miedzy, brzegu rowu czy obrzeża plantacji, bez generowania całego wachlarza równoległych ścieżek o tym samym kształcie. System pilnuje wtedy tylko tej jednej trajektorii. Na ilustracji widać jednak pełen zestaw równoległych przejazdów, co jest typowe dla odmiany A‑B konturowej, a nie dla prostego trybu konturowego. Z kolei tryb A‑B w klasycznym rozumieniu oznacza linię prostą między punktem A i B. Wszystkie kolejne przejazdy są prostymi równoległymi liniami. To świetnie działa na prostokątnych działkach, ale kompletnie nie pasuje do tak nieregularnego pola jak na ilustracji – mielibyśmy wtedy sporo klina, poprawek i kombinowania na końcach. Tryb jazdy po okręgu to zupełnie inna bajka: ścieżki przyjmują kształt współśrodkowych okręgów lub łuków, typowo wokół środka pola albo jakiegoś punktu referencyjnego. Stosuje się to raczej na polach o zbliżonym kształcie koła lub przy specyficznych zadaniach, np. przywadnianiu czy niektórych zabiegach uprawowych. Na rysunku nie ma żadnego wspólnego środka ani okręgów, tylko „wstęgi” ukształtowane zgodnie z granicą działki. Typowym błędem jest patrzenie tylko na krzywiznę linii, bez zwrócenia uwagi, czy są one prostymi przesunięciami od linii bazowej A‑B. Właśnie to przesunięcie konturu w bok, tworzące zestaw równoległych ścieżek o tym samym zakrzywionym kształcie, definiuje tryb A‑B konturowy. Z punktu widzenia dobrych praktyk prowadzenia równoległego w rolnictwie precyzyjnym, wybór właściwego trybu (A‑B, A‑B konturowy, konturowy, okrągły) zawsze powinien wynikać z geometrii pola i planowanej technologii uprawy, a nie tylko z pierwszego wrażenia na ekranie terminala.