Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Nawigacja satelitarna i automatyczne prowadzenie ISOBUS i terminale sterujące Diagnostyka, kalibracja i naprawa
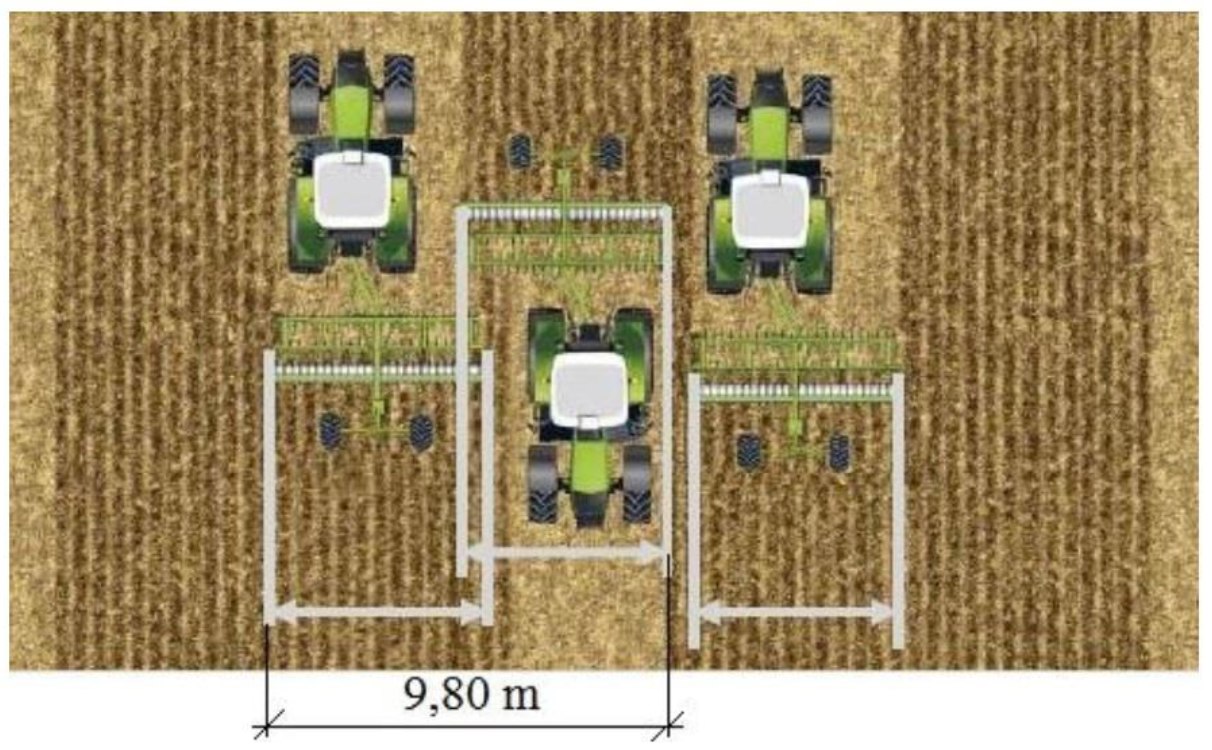
W wyniku uciągu bocznego nastąpiło prostopadłe przesunięcie maszyny które spowodowało, że maszyna o szerokości roboczej 5 m zostawia po dwóch przejazdach pas o szerokości 9,80 m. Na podstawie dokonanej analizy schematu i fragmentu instrukcji obsługi wskaż, jaką wartość należy wpisać w terminalu jako przesunięcie?
| Ustalenie i ustawienie przesunięcia urządzenia: |
| - Ustawić prawidłową szerokość roboczą dołączonego urządzenia |
| - Pokrycie ustawić na 0,00 m |
| - Przejechać ślad 0 w obu kierunkach z uaktywnionym autopilotem |
| - Zmierzyć na podłożu przesunięcie śladu między oboma kierunkami jazdy w śladzie 0 |
| - Wartość pomiaru podzielić przez 2 i wpisać, jako przesunięcie urządzenia w Terminalu. |
| - Test: Przy prawidłowym wprowadzeniu, ślady przejazdów dla obu kierunków jazdy w śladzie 1 i we wszystkich następnych muszą mieć takie samo pokrycie. |
Odpowiedzi
Informacja zwrotna
Prawidłowa wartość przesunięcia to 10 cm, bo maszyna o szerokości roboczej 5 m po dwóch przejazdach powinna zostawić pas 10,00 m. Z pomiaru wychodzi 9,80 m, czyli faktyczna odległość między środkami przejazdów jest o 0,20 m mniejsza od teoretycznej. Ten błąd 20 cm powstaje w wyniku uciągu bocznego narzędzia – agregat jest stale ściągany w jedną stronę względem linii prowadzenia GNSS. Zgodnie z instrukcją: mierzymy różnicę między śladami jazdy w obu kierunkach, a następnie wynik dzielimy przez 2 i tę wartość wpisujemy w terminalu jako offset narzędzia. 0,20 m : 2 = 0,10 m, czyli 10 cm. W praktyce takie ustawienie offsetu w terminalu (ISOBUS lub firmowym, np. Claas, John Deere, Trimble) powoduje, że autopilot automatycznie koryguje tor jazdy tak, aby środek maszyny wirtualnie „przesunąć” względem linii prowadzenia. Dzięki temu kolejne przejazdy mają równomierne pokrycie, nie ma pasów nieobrobionych ani podwójnie opracowanych. To jest standardowa procedura kalibracji przy pracy z nawigacją równoległą – zawsze najpierw ustawiamy poprawną szerokość roboczą, pokrycie na 0, wykonujemy przejazd tam i z powrotem, mierzymy różnicę, dzielimy przez dwa i wpisujemy w parametry przesunięcia narzędzia. Moim zdaniem warto tę procedurę powtarzać przy zmianie gleby, opon lub maszyny, bo uciąg boczny potrafi się mocno zmieniać.