Kwalifikacja: ROL.08 - Eksploatacja systemów mechatronicznych w rolnictwie
Kategorie: Nawigacja satelitarna i automatyczne prowadzenie
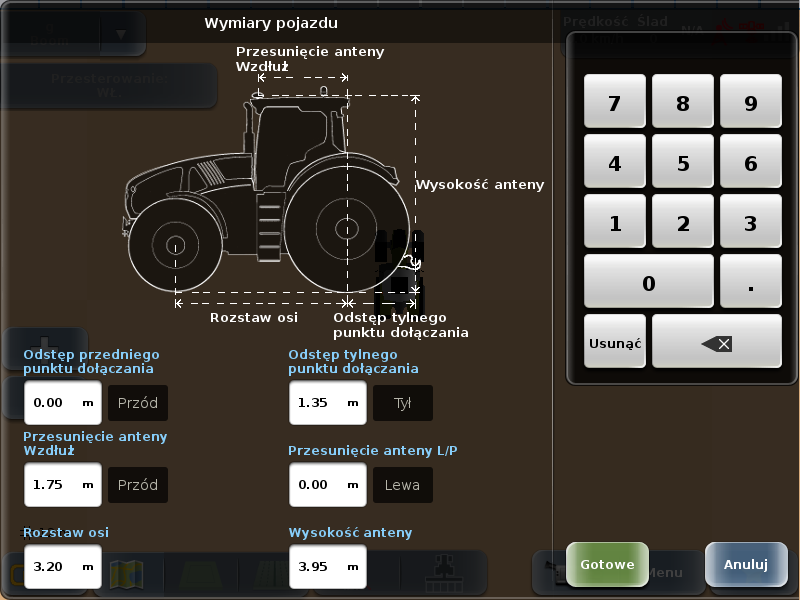
Zamieszczony zrzut ekranu przedstawiający wymiarowanie umieszczenia anteny GPS dotyczy ciągnika
| Parametr/Odległość | Ciągnik | |||
|---|---|---|---|---|
| I | II | III | IV | |
| Anteny od osi tylnej [m] | 1,75 | 1,80 | 1,75 | 1,60 |
| Końca zaczepu od osi tylnej [m] | 1,30 | 1,35 | 1,35 | 1,40 |
| Anteny od podłoża [m] | 3,90 | 3,80 | 3,95 | 3,90 |
| Rozstaw kół [m] | 3,35 | 3,30 | 3,20 | 3,40 |
Odpowiedzi
Informacja zwrotna
Poprawna jest odpowiedź III, bo dokładnie te wartości widać w oknie konfiguracyjnym terminala. Na ekranie w polach wprowadzania parametrów ciągnika wpisane są: przesunięcie anteny wzdłuż 1,75 m (czyli odległość anteny od osi tylnej), odstęp tylnego punktu dołączania 1,35 m (koniec zaczepu od osi tylnej), rozstaw osi 3,20 m oraz wysokość anteny 3,95 m nad podłożem. Dokładnie taki zestaw liczb występuje w kolumnie III w tabeli, więc logicznie to ten ciągnik jest przedstawiony na zrzucie. W praktyce takie ekranowe okno to standard w systemach automatycznego prowadzenia GNSS – niezależnie czy to Trimble, John Deere, Topcon czy inni producenci – zawsze musimy wprowadzić: położenie anteny względem osi tylnej, punktu zaczepu narzędzia oraz jej wysokość. Od tych danych zależy poprawne obliczanie pozycji narzędzia, dokładne prowadzenie po śladzie AB, kompensacja skrętu oraz działanie Section Control. Moim zdaniem warto się przyzwyczaić do dokładnego odczytywania takich ekranów, bo przy każdej zmianie ciągnika albo konfiguracji zaczepu trzeba te wartości szybko zweryfikować i wprowadzić bezbłędnie, inaczej nawet bardzo dokładny sygnał RTK nie da nam realnej dokładności w polu.