Montaż, uruchamianie i konser…
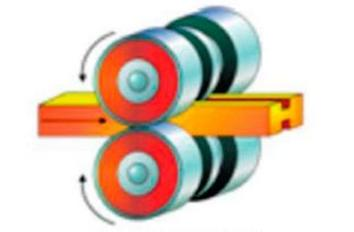
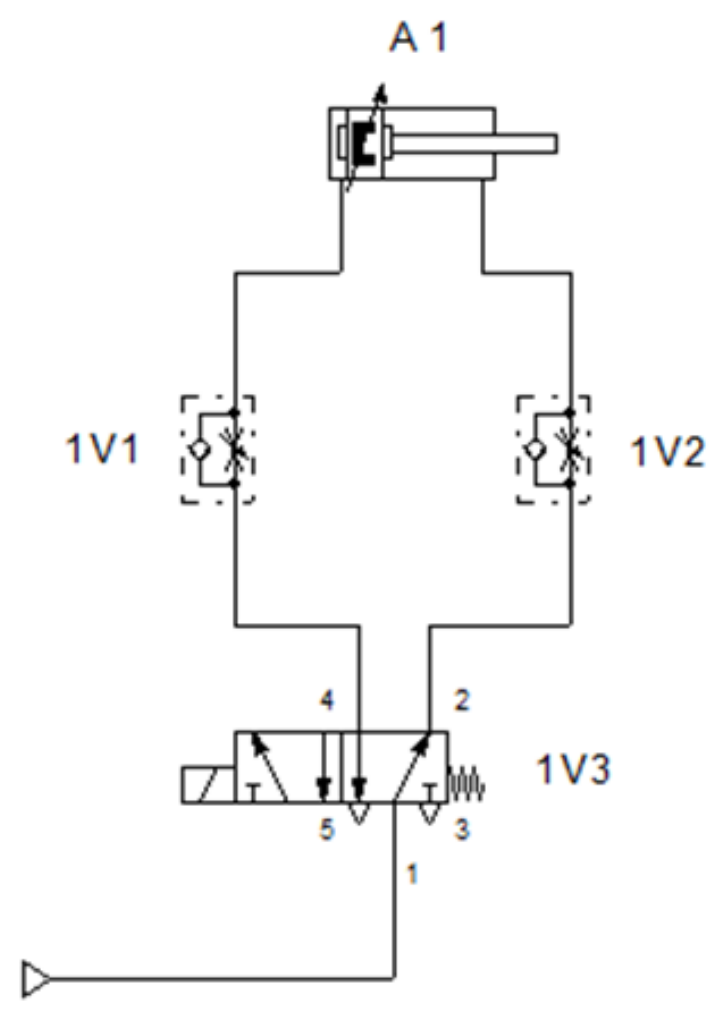
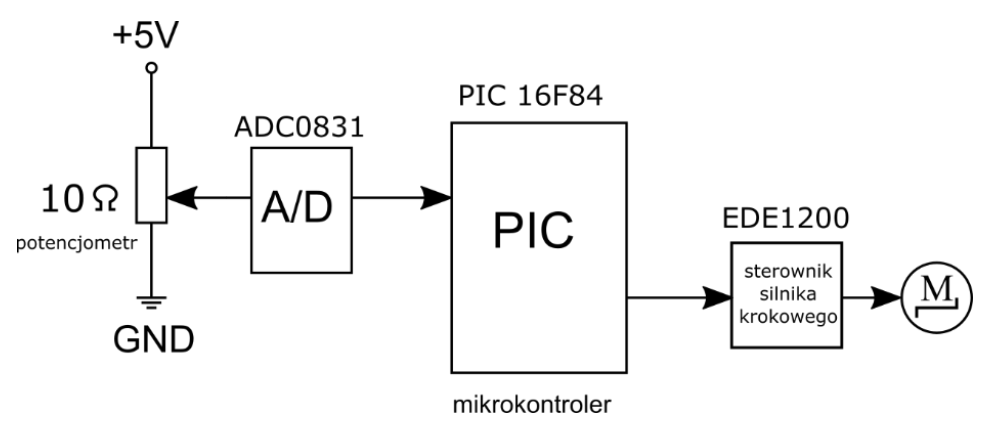
Jaką kinematykę reprezentuje przedstawiony na rysunku manipulator?

A. PPP
B. OPP
C. OPO
D. OOO
| Nazwa elementu | Pomiar rezystancji styków w Ω | |
|---|---|---|
| Przed przyciśnięciem | Po przyciśnięciu | |
| Przycisk S1 | 0,22 | ∞ |


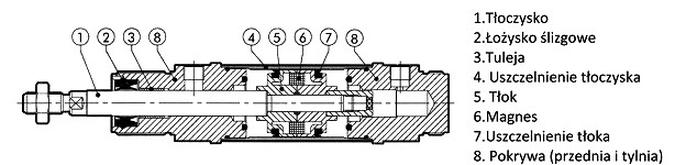
| Tabl. 1. Parametry siłowników | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| średnica cylindra w mm | 12 | 16 | 20 | 25 | 32 | 40 | 50 | 63 | 80 | 100 | 125 | 160 | 200 | |
| średnica tłoczyska w mm | 6 | 8 | 8 | 10 | 12 | 16 | 20 | 20 | 25 | 25 | 32 | 40 | 40 | |
| gwinty otworów przyłączeniowych | M5 | M5 | G⅛ | G⅛ | G⅛ | G¼ | G¼ | G⅜ | G⅜ | G⅜ | G½ | G¾ | G¾ | |
| siła pchająca przy po = 6 bar w N | siłownik jednostron. dział. | 50 | 96 | 151 | 241 | 375 | 644 | 968 | 1560 | 2530 | 4010 | -- | -- | -- |
| siłownik dwustron. dział. | 58 | 106 | 164 | 259 | 422 | 665 | 1040 | 1650 | 2660 | 4150 | 6450 | 10600 | 16600 | |
| siła ciągnąca przy po = 6 bar w N | siłownik dwustronnego działania | 54 | 79 | 137 | 216 | 364 | 550 | 870 | 1480 | 2400 | 3890 | 6060 | 9960 | 15900 |
| siłownik jednostron. dział. | 10, 25, 50 | 25, 50, 80, 100 | -- | |||||||||||
| skoki w mm | siłownik dwustron. dział. | do 160 | do 200 | do 320 | 10, 25, 50, 80, 100, 160, 200, 250, 320, 400, 500........2000 | |||||||||


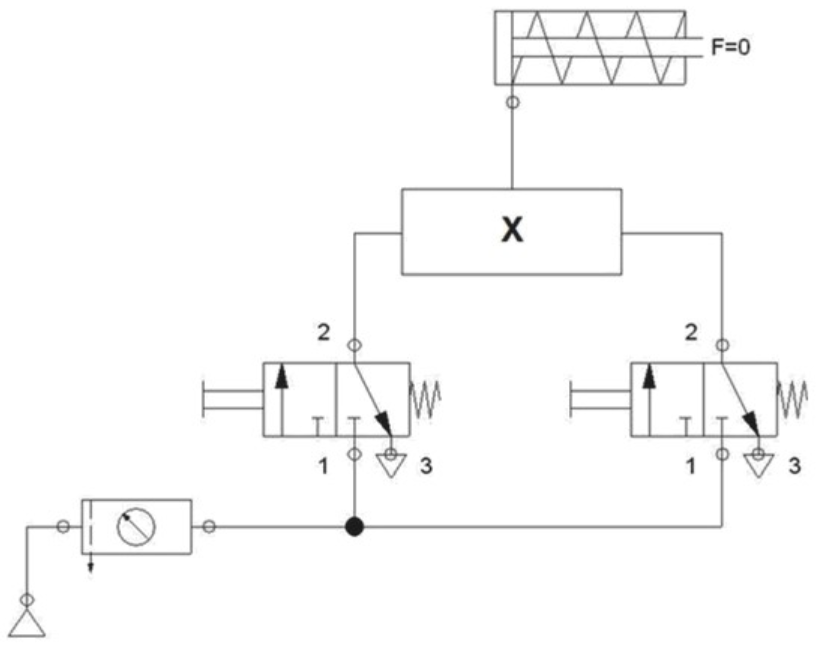


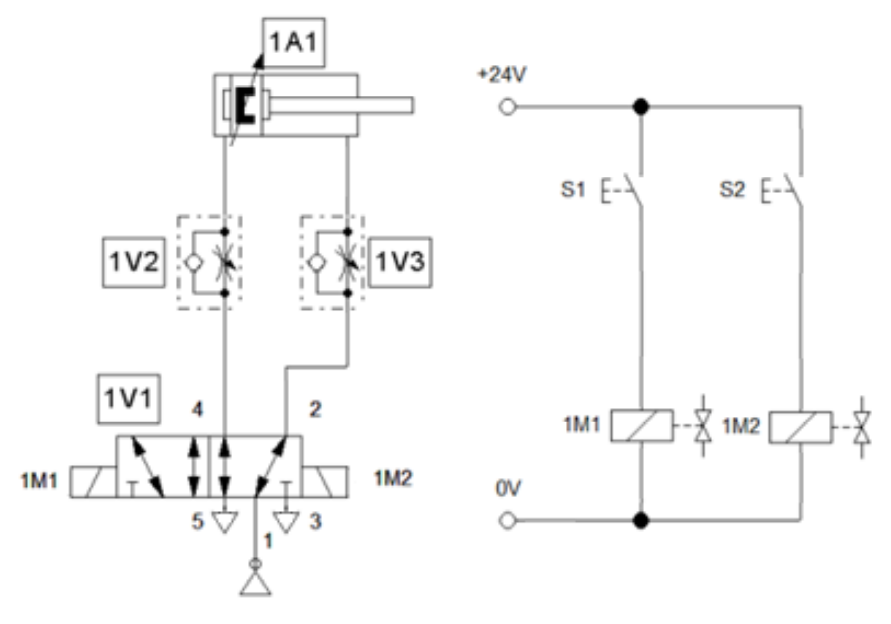
| Wersja zaworu | W1 | W2 | W3 | W4 |
|---|---|---|---|---|
| Liczba cewek | 1 | 2 | 1 | 2 |
| Typ zaworu | 4/2 | 4/3 | 5/2 | 5/2 |
| Biegunowość zasilania | dowolna | dowolna | dowolna | dowolna |