Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Elementy i podzespoły Sterowanie i programowanie
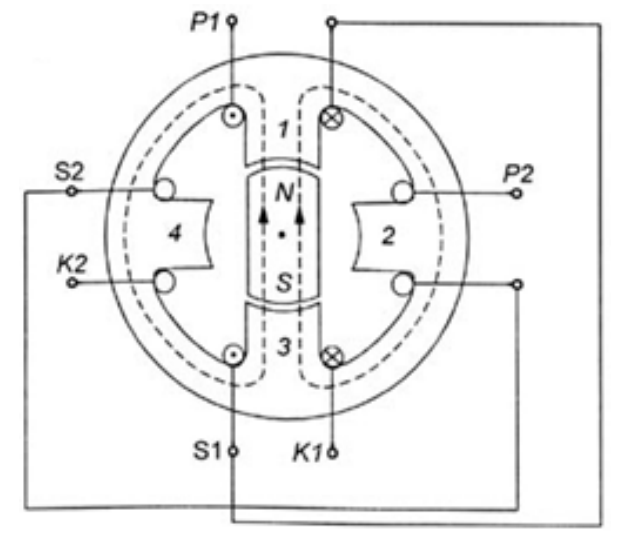
Silnik krokowy zastosowany w napędzie mechatronicznym sterowany jest za pomocą dedykowanego układu mikroprocesorowego. Która z wymienionych sekwencji komutacji spowoduje wirowanie wirnika silnika w prawo?
Odpowiedzi
Informacja zwrotna
Wybrałeś prawidłową sekwencję komutacji dla ruchu wirnika silnika krokowego w prawo: (+P1)-(+P2)-(-P1)-(-P2). W silnikach krokowych tego typu kluczowe jest właściwe sterowanie cewkami, bo to od sekwencji włączania i wyłączania poszczególnych uzwojeń zależy kierunek obrotu. W praktyce stosuje się właśnie takie czterostanowe sekwencje binarne, żeby silnik wykonywał kroki w określonym kierunku. Ta konkretna kolejność wysterowania cewki najpierw P1 z plusem, potem P2 z plusem, następnie P1 z minusem i na koniec P2 z minusem powoduje, że pole magnetyczne wiruje zgodnie z ruchem wskazówek zegara. To jest zgodne z większością standardów dla napędów mechatronicznych, gdzie stosuje się tzw. pełnokrokową komutację jednobiegunową. Z mojego doświadczenia, przy sterowaniu mikroprocesorowym warto stosować nawet bardziej zaawansowane profile, np. mikrokrokowe, które pozwalają na płynniejszą pracę i mniejsze drgania, ale pełny krok to podstawa i absolutny must-have na egzaminach. Taką logikę przełączania spotkasz np. w prostych robotach mobilnych, drukarkach 3D albo precyzyjnych manipulatorach. W praktyce zawsze warto rysować sobie schemat kolejnych stanów, bo bardzo łatwo się pomylić i wtedy silnik zamiast kręcić się w prawo, będzie tylko bujał się w miejscu albo kręcił w przeciwną stronę. Dobrym zwyczajem jest stosowanie oznaczeń plus/minus zgodnie z dokumentacją producenta – wtedy nie ma niespodzianek przy podłączeniu. Jak dla mnie, zrozumienie tej sekwencji to absolutna podstawa w automatyce i elektronice.