Kwalifikacja: MOT.02 - Obsługa, diagnozowanie oraz naprawa mechatronicznych systemów pojazdów samochodowych
Kategorie: Systemy mechatroniczne Układy elektryczne i elektroniczne
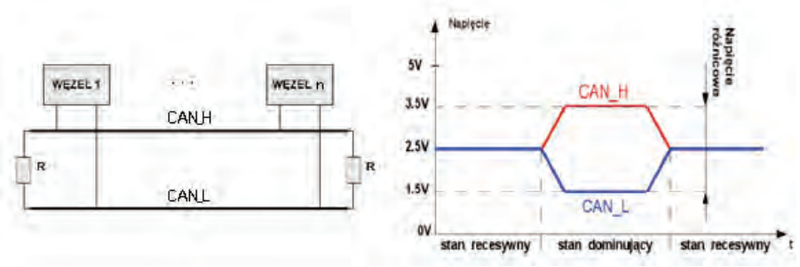
Na podstawie rysunku opisującego standard magistrali High Speed - ISO11898 (szybka transmisja danych do 1Mb/s) wynika, że w trakcie transmisji danych pomiędzy poszczególnymi węzłami układu
Odpowiedzi
Informacja zwrotna
Standard magistrali CAN High-Speed (ISO 11898) rzeczywiście zakłada, że w trakcie transmisji, czyli w stanie dominującym, napięcie różnicowe pomiędzy liniami CAN_H i CAN_L wynosi około 2 V. Wynika to z tego, że w tym momencie na CAN_H pojawia się napięcie rzędu 3,5 V, a na CAN_L około 1,5 V – właśnie ta różnica daje nam te 2 wolty. Dzięki takiej konstrukcji sygnalizacji różnicowej całość układu jest dużo bardziej odporna na zakłócenia elektromagnetyczne, co w praktyce jest kluczowe np. w motoryzacji czy automatyce przemysłowej. Moim zdaniem to mega sprytne rozwiązanie inżynierskie, bo pozwala na niezawodną komunikację nawet w bardzo trudnych warunkach. Warto też pamiętać, że magistrala CAN działa na zasadzie stanów dominujących i recesywnych – w stanie recesywnym napięcia na obydwu liniach są zbliżone (około 2,5 V), więc napięcie różnicowe praktycznie zanika. Praktycznie rzecz biorąc, poprawne rozpoznanie stanów na magistrali pozwala na diagnostykę problemów czy analizę jakości transmisji. W branży automotive taka wiedza to podstawa, bo nawet niewielkie błędy w interpretacji poziomów napięć potrafią skutkować poważnymi problemami komunikacyjnymi w sieci pojazdu.