Kwalifikacja: MOT.02 - Obsługa, diagnozowanie oraz naprawa mechatronicznych systemów pojazdów samochodowych
Kategorie: Systemy mechatroniczne Układy elektryczne i elektroniczne Diagnostyka i pomiary
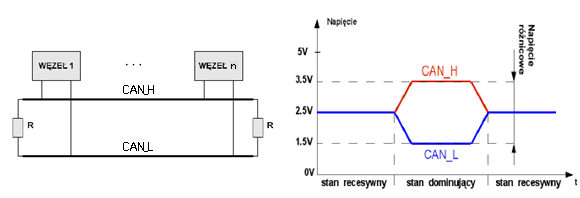
Na podstawie rysunku opisującego standard magistrali High Speed - ISO11898 (szybka transmisja danych do 1 Mb/s) wynika, że w trakcie transmisji danych pomiędzy poszczególnymi węzłami układu
Odpowiedzi
Informacja zwrotna
W standardzie magistrali CAN High Speed (ISO11898), podczas transmisji danych (czyli w stanie dominującym), na liniach CAN_H i CAN_L występuje napięcie różnicowe wynoszące około 2 V. To właśnie ta różnica jest kluczowa – nie chodzi tutaj o wartości napięcia względem masy, tylko o różnicę potencjałów pomiędzy dwiema liniami sygnałowymi. W stanie dominującym CAN_H podnosi się do około 3,5 V, a CAN_L spada do około 1,5 V, co daje właśnie te 2 V różnicy. Dzięki temu układ jest bardzo odporny na zakłócenia, bo sygnały zakłócające zwykle wpływają jednakowo na obie linie i nie zmieniają tej różnicy. Z mojego doświadczenia, w praktyce to rozwiązanie jest niezastąpione w motoryzacji, zwłaszcza w trudnych warunkach – np. w pojazdach, gdzie jest dużo elektroniki i przewodów. Warto też wiedzieć, że takie podejście jest zgodne z dobrą praktyką branżową, bo pozwala na wysoką niezawodność transmisji nawet przy dużych odległościach między węzłami. Magistrala CAN High Speed dzięki temu stała się standardem w samochodach, autobusach i maszynach przemysłowych. Dla projektantów układów bardzo ważne jest, by pamiętać o tej różnicy napięć i odpowiednio dobierać rezystory terminujące (zwykle 120 Ω na końcach magistrali), żeby zapewnić stabilność sygnału i brak odbić.