Kwalifikacja: MOT.02 - Obsługa, diagnozowanie oraz naprawa mechatronicznych systemów pojazdów samochodowych
Kategorie: Systemy mechatroniczne Diagnostyka i pomiary
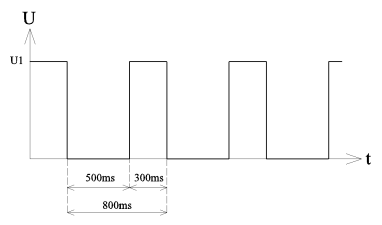
Na rysunku przedstawiono przebieg sygnału
Odpowiedzi
Informacja zwrotna
Świetnie wychwycony temat! Przedstawiony na rysunku przebieg napięcia jest klasycznym przykładem sygnału o określonym współczynniku wypełnienia (ang. duty cycle). Współczynnik wypełnienia określa, jaką część jednego pełnego cyklu sygnału prostokątnego stanowi czas, w którym sygnał utrzymuje wartość wysoką (najczęściej logiczne 1). Na rysunku mamy cykl, który trwa 800 ms, z czego przez 500 ms sygnał jest na wysokim poziomie, a przez 300 ms jest na niskim. No i właśnie – współczynnik wypełnienia obliczamy jako czas 'w stanie wysokim' podzielony przez cały okres, czyli 500 ms / 800 ms, co daje 62,5%. Takie sygnały są często wykorzystywane w sterowaniu silnikami, regulacji jasności diod LED czy w układach PWM stosowanych w elektronice samochodowej. Osobiście uważam, że zrozumienie duty cycle to podstawa pracy z nowoczesnymi sterownikami, bo bardzo często zamiast wartości analogowych przetwarzamy sygnały w postaci przebiegów o zmiennym wypełnieniu. W praktyce to właśnie współczynnik wypełnienia pozwala sterować mocą dostarczaną do odbiorników czy czasem trwania określonych operacji, na przykład wtryskiwaczy paliwa. Warto pamiętać, że dobrze dobrany duty cycle pozwala zoptymalizować pracę wielu urządzeń i zredukować zużycie energii, co jest standardem w nowoczesnych aplikacjach przemysłowych i automotive. Z mojego doświadczenia – umiejętność interpretacji takich przebiegów jest bardzo ceniona w branży.