Kwalifikacja: MOT.02 - Obsługa, diagnozowanie oraz naprawa mechatronicznych systemów pojazdów samochodowych
Kategorie: Systemy mechatroniczne Układy elektryczne i elektroniczne Diagnostyka i pomiary
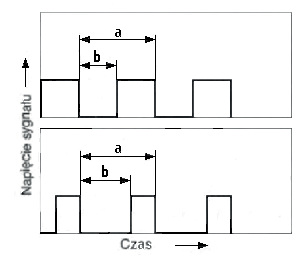
W trakcie uruchamiania układu sterowania silnikiem krokowym na podstawie otrzymanych oscylogramów sygnału PWM można stwierdzić, że
Odpowiedzi
Informacja zwrotna
Odpowiedź jest poprawna, bo faktycznie w większości układów sterowania silnikami krokowymi, gdy stosuje się sygnał PWM (czyli modulowany szerokością impulsu), częstotliwość jest ustawiana na stałą, a tylko współczynnik wypełnienia (czyli stosunek czasu trwania stanu wysokiego do całego okresu sygnału) się zmienia. To jest bardzo praktyczne, bo dzięki stałej częstotliwości układ napędowy działa stabilnie i unikamy niepotrzebnych rezonansów czy zakłóceń – szczególnie ważne przy precyzyjnym sterowaniu ruchem. Zmienność współczynnika wypełnienia pozwala natomiast płynnie regulować moment obrotowy czy prędkość silnika, co ma ogromne znaczenie w automatyce przemysłowej czy robotyce. W praktyce dokładnie takie rozwiązanie spotyka się np. w sterownikach silników krokowych bazujących na popularnych układach jak A4988 czy DRV8825, gdzie częstotliwość taktowania kroku jest stała, a to właśnie „duty cycle” odpowiada za dostarczaną moc. W literaturze branżowej i instrukcjach technicznych bardzo często podkreśla się, że zmiana współczynnika wypełnienia PWM umożliwia regulację prądu cewki bez zmiany częstotliwości, co jest zgodne z dobrymi praktykami projektowania systemów napędowych. Z mojego doświadczenia wynika, że jeśli chcesz mieć stabilną pracę silnika krokowego i jednocześnie elastycznie nim sterować, zdecydowanie warto stosować taki model sterowania.