Kwalifikacja: ELE.09 - Obsługa i konserwacja urządzeń dźwigowych
Zawód: Technik urządzeń dźwigowych
Kategorie: Eksploatacja i konserwacja Diagnostyka i naprawa Układy elektryczne i sterowanie
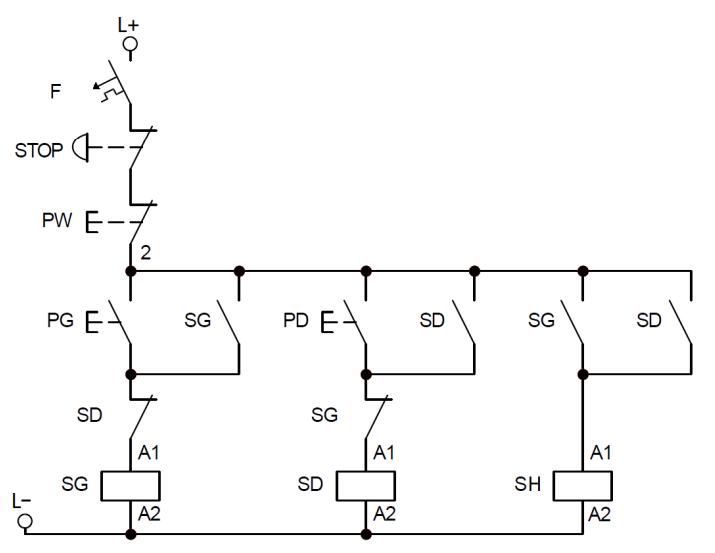
Dla tablicy przejść określ stan następny Qₙ₊₁ dla kroku 3 (Lp. = 3)
Tablica przejść dla układu sterowania urządzenia dźwigowego (w tablicy przejść stany logiczne 0 lub 1 dla elementów SG, SD i SH wynikają ze stanu aktualnego, z wejść sterujących i ze schematu układu sterowania).
| Lp. | Stan aktualny Qₙ | Wejścia sterujące | Stan następny Qₙ₊₁ | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SG | SD | SH | F | STOP | PW | PG | PD | SG | SD | SH | |
| 1. | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 1 |
| 2. | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| 3. | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | |||
Odpowiedzi
Informacja zwrotna
Dobrze rozpoznany stan następny dla kroku 3 – to właśnie układ z SG = 1, SD = 0, SH = 1. Wynika to wprost z zasad analizy tablicy przejść: po prostu odczytujesz wartości z trzeciego wiersza w kolumnach stanu następnego. W praktyce, taka interpretacja jest bardzo przydatna podczas uruchamiania czy testowania układów sterowania w rzeczywistych aplikacjach dźwigowych. Z mojego doświadczenia, najwięcej błędów pojawia się, gdy ktoś za bardzo kombinuje z teorią i nie patrzy uważnie na konkretne wartości w tablicy – a tu trzeba po prostu być dokładnym i cierpliwym. Fachowcy w branży automatyki często stosują podobne tabele przy rozruchach szaf sterowniczych, kiedy trzeba szybko sprawdzić, czy sekwencja zmian stanów jest zgodna z założeniami bezpieczeństwa i logiką działania urządzenia. Standardy branżowe, np. normy dotyczące bezpieczeństwa funkcjonalnego maszyn, bardzo podkreślają konieczność jednoznacznej interpretacji sygnałów w cyklu pracy. Moim zdaniem, taka umiejętność analizy tabeli przejść to podstawa, jeśli ktoś chce być dobrym automatykiem. Taka wiedza przydaje się też np. podczas programowania sterowników PLC, gdzie logika krokowa, oparta na podobnych przejściach, jest powszechnie stosowana. Prawidłowa odpowiedź oznacza, że rozumiesz jak odczytywać zmiany stanów i jakie sygnały są aktywne w danym cyklu – a to już jest spora przewaga, nie tylko na egzaminach, ale i na prawdziwym zakładzie produkcyjnym.