Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Elementy i podzespoły Montaż i demontaż
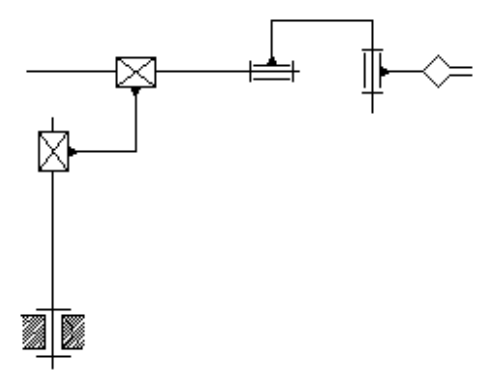
Ile napędów jest zastosowanych w manipulatorze, którego schemat przedstawiono na rysunku?
Odpowiedzi
Informacja zwrotna
Odpowiedź wskazująca na pięć napędów w manipulatorze jest prawidłowa, ponieważ wiele nowoczesnych manipulatorów wykorzystuje zaawansowane systemy napędowe, które pozwalają na precyzyjne sterowanie ruchem. W przypadku pięciu napędów, każdy z nich może odpowiadać za różne osie ruchu, co zapewnia większą elastyczność i dokładność podczas wykonywania zadań. Na przykład, w robotyce przemysłowej, manipulatory z pięcioma napędami są w stanie wykonać bardziej skomplikowane operacje, takie jak montaż, pakowanie czy manipulowanie delikatnymi przedmiotami. W praktyce, stosowanie pięciu napędów pozwala na uzyskanie większej liczby stopni swobody, co jest kluczowe w wielu aplikacjach. Dobre praktyki w projektowaniu manipulatorów sugerują również, że większa liczba napędów może poprawić zdolności adaptacyjne robota, umożliwiając mu lepsze dostosowanie się do zmiennych warunków pracy. Ponadto, zgodnie z normami ISO 10218 dotyczącymi bezpieczeństwa robotów przemysłowych, odpowiednia liczba napędów może wpłynąć na poprawę stabilności i bezpieczeństwa operacji, co jest kluczowe w środowisku przemysłowym.