Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Elementy i podzespoły Pomiary i diagnostyka
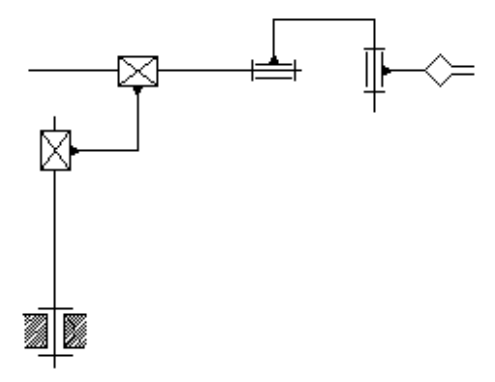
Ile stopni swobody ma manipulator, którego schemat przedstawiono na rysunku?
Odpowiedzi
Informacja zwrotna
Manipulator z pięcioma stopniami swobody to świetna rzecz, bo potrafi ruszać się w trzech osiach oraz obracać wokół trzech osi. Dzięki temu może zarówno przesuwać się, jak i kręcić w przestrzeni, co jest naprawdę ważne w różnych zastosowaniach – mówimy tu o przemyśle czy robotyce. Z mojego doświadczenia, pięć stopni swobody to super rozwiązanie, bo daje większą precyzję i elastyczność, co przydaje się na przykład przy montażu części, przenoszeniu materiałów lub nawet bardziej skomplikowanych zadaniach. Widziałem, jak roboty na liniach montażowych wykorzystują to, bo dzięki temu mogą dostosowywać się do różnych zadań i warunków. W inżynierii robotów, te manipulatory są właściwie standardem, bo balansują między złożonością a tym, co mogą zrobić. Warto też wspomnieć, że według norm ISO dotyczących robotyki, projektując manipulatory, trzeba brać pod uwagę stopnie swobody, bo to ma wpływ na ich efektywność i bezpieczeństwo. Te wszystkie cechy sprawiają, że manipulator to naprawdę świetny wybór w nowoczesnych zastosowaniach przemysłowych.