Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Elementy i podzespoły Pomiary i diagnostyka
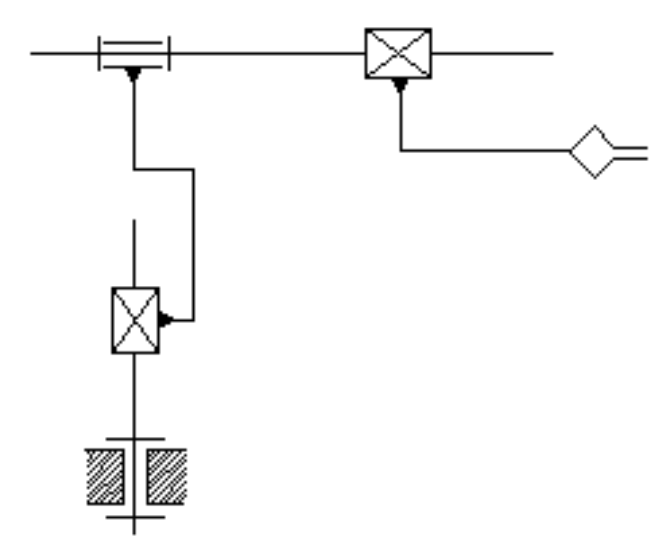
Ile stopni swobody ma manipulator, którego schemat przedstawiono na rysunku?
Odpowiedzi
Informacja zwrotna
Ten manipulator, co go widzisz na schemacie, ma 4 stopnie swobody. To znaczy, że może się poruszać w czterech różnych kierunkach. Ma trzy obrotowe przeguby, które pozwalają mu na rotację w trzech osiach, a do tego jeden przegub liniowy, który umożliwia przesuwanie wzdłuż jednej osi. Taki układ jest całkiem typowy w przemyśle, zwłaszcza w robotyce, gdzie trzeba precyzyjnie manewrować urządzeniami w różnych warunkach. Myślę, że 4 stopnie swobody to super rozwiązanie do zadań takich jak montaż czy pakowanie. Poza tym, w obróbce materiałów też się przydaje, gdy trzeba przesuwać narzędzia w kilku osiach naraz. W przemyśle warto projektować te maszyny z uwzględnieniem norm ISO, bo bezpieczeństwo operatorów i otoczenia to podstawa. Rozumienie, co to są te stopnie swobody, to kluczowa sprawa dla inżynierów zajmujących się automatyzacją.