Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Pomiary i diagnostyka
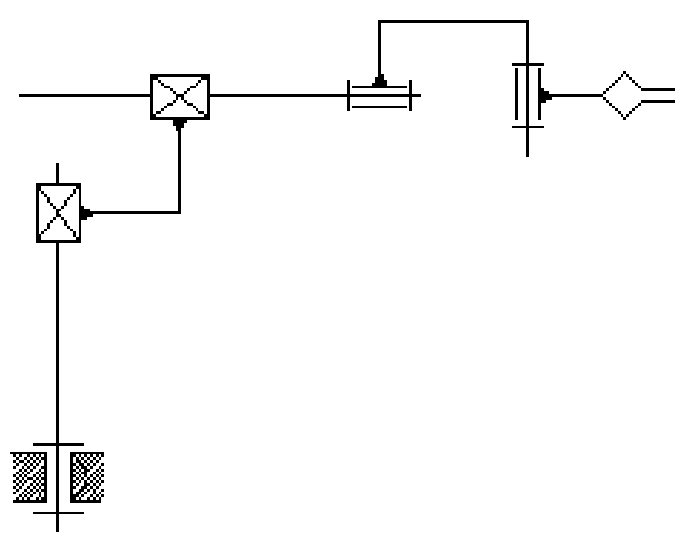
Manipulator, którego schemat kinematyczny przedstawiono na rysunku, ma
Odpowiedzi
Informacja zwrotna
Odpowiedź "5 stopni swobody" jest poprawna, ponieważ manipulator z przedstawionym schematem kinematycznym posiada pięć przegubów. Każdy przegub umożliwia ruch w różnych płaszczyznach, co jest kluczowe w kontekście automatyzacji procesów przemysłowych i robotyki. W praktyce, manipulatory o pięciu stopniach swobody są często wykorzystywane w zadaniach wymagających precyzyjnego chwytania i manipulacji przedmiotami, na przykład w montażu komponentów elektronicznych czy w przemyśle motoryzacyjnym. Zgodnie z normami ISO 9283, stopnie swobody manipulatora powinny być projektowane z myślą o maksymalnej efektywności operacyjnej oraz elastyczności w wykonywaniu różnych zadań. Zrozumienie liczby stopni swobody jest kluczowe dla inżynierów i techników zajmujących się projektowaniem i programowaniem systemów robotycznych, co wpływa na wydajność i jakość zastosowań w branży. Dodatkowo, manipulatory o większej liczbie stopni swobody mogą wykonywać bardziej złożone operacje, co podkreśla znaczenie tej wiedzy w nowoczesnej automatyzacji.