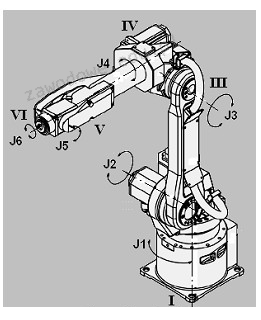
Iloma stopniami swobody w sumie dysponują elementy robota przemysłowego przedstawionego na rysunku?
Odpowiedzi
Informacja zwrotna
Odpowiedź "6 - tylko ruchy obrotowe" jest prawidłowa, ponieważ w analizowanym robocie przemysłowym możemy zidentyfikować sześć osi ruchu, które są odpowiedzialne za ruch obrotowy. Te osie, oznaczone jako J1 do J6, umożliwiają robotowi wykonywanie wszelkiego rodzaju manipulacji w przestrzeni roboczej. W kontekście przemysłowym, roboty o sześciu stopniach swobody są w stanie osiągnąć dużą precyzję i elastyczność w ruchach, co czyni je idealnymi do zastosowań takich jak montaż, spawanie, czy malowanie. W przypadku robotów przemysłowych standard ISO 9283 definiuje metody oceny ich wydajności, co podkreśla znaczenie odpowiedniego doboru stopni swobody w kontekście aplikacji. Prawidłowe zrozumienie i umiejętność identyfikacji osi ruchu w robotyce są kluczowe dla efektywnego projektowania i programowania robotów, co wpływa na ich późniejsze wykorzystanie w produkcji.
Wybór odpowiedzi sugerującej 5 stopni swobody, niezależnie od tego, czy jest to 5 ruchów obrotowych czy posuwowych, jest niewłaściwy. Roboty przemysłowe, aby mogły w pełni wykonywać złożone zadania manipulacyjne, muszą mieć co najmniej sześć stopni swobody. Pięć stopni swobody ogranicza możliwości ruchu, co w praktyce oznacza, że robot mógłby mieć trudności z precyzyjnym osiągnięciem niektórych pozycji lub orientacji obiektów, zwłaszcza w złożonych scenariuszach. W kontekście ruchów posuwowych, większość współczesnych robota przemysłowych opiera się na ruchach obrotowych, które pozwalają na pełną manipulację w trzech wymiarach. Wybierając 6 stopni swobody, w pełni wykorzystujemy projektowe możliwości robota, co jest zgodne z najlepszymi praktykami w inżynierii robota. Błędem jest zatem myślenie, że roboty mogą pracować efektywnie z mniejszą liczbą osi ruchu, co często prowadzi do niedostatecznej wydajności w zastosowaniach przemysłowych. Zrozumienie zasady działania i struktury robotów przemysłowych jest kluczowe, aby unikać tego typu błędów logicznych i podejmować właściwe decyzje projektowe.