Kwalifikacja: TLO.01 - Wykonywanie obsługi technicznej wyposażenia awionicznego i elektrycznego statków powietrznych
Zawód: Technik awionik
Kategorie: Systemy awioniczne Pomiary i czujniki Elementy i układy elektroniczne
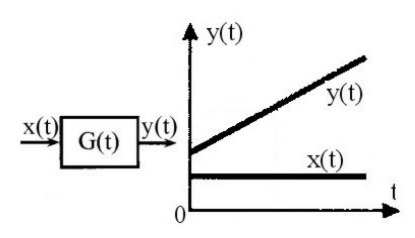
Na rysunku przedstawiono odpowiedź skokową członu
Odpowiedzi
Informacja zwrotna
Odpowiedź PI jest poprawna, ponieważ w przypadku członu proporcjonalno-całkującego (PI) odpowiedź skokowa charakteryzuje się liniowym wzrostem wartości wyjściowej y(t) po zadaniu skoku wartości wejściowej x(t). Człon całkujący odpowiada za akumulację błędu w czasie, co prowadzi do ciągłego wzrostu sygnału wyjściowego, natomiast człon proporcjonalny wpływa na wartość początkową tego sygnału. To połączenie skutkuje liniowym wzrostem, co można zaobserwować graficznie na wykresie. W praktycznych zastosowaniach, takich jak regulacja temperatury w piecach przemysłowych, stosowanie regulatora PI pozwala na szybkie osiąganie zadanej wartości oraz skuteczną eliminację błędów w stanie ustalonym. Warto dodać, że w standardach takich jak ISA-88 dotyczących automatyzacji procesów, regulacja PI jest powszechnie stosowana ze względu na swoją prostotę i efektywność, co czyni ją istotnym elementem nowoczesnych systemów kontrolnych.