Kwalifikacja: ELM.06 - Eksploatacja i programowanie urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
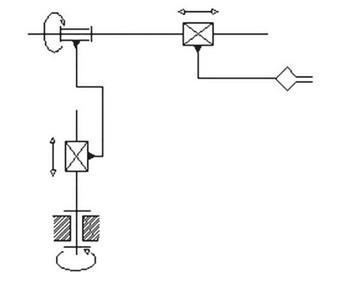
Na podstawie przedstawionego schematu manipulatora określ liczbę jego stopni swobody.
Odpowiedzi
Informacja zwrotna
Manipulator przedstawiony na schemacie dysponuje czterema niezależnymi ruchami, co oznacza, że posiada łącznie 4 stopnie swobody. Każdy z tych ruchów odgrywa kluczową rolę w precyzyjnym działaniu manipulatorów w automatyce oraz robotyce. Ruch obrotowy wokół osi pionowej umożliwia orientację narzędzia w różnych kierunkach, co jest szczególnie ważne w zastosowaniach wymagających precyzyjnego pozycjonowania. Liniowy ruch w górę i w dół pozwala na dostosowanie wysokości narzędzia, co jest niezbędne w przypadku pracy w różnych warunkach roboczych. Ruch liniowy w lewo i w prawo oraz do przodu i do tyłu daje manipulatorowi elastyczność w poruszaniu się w przestrzeni roboczej, co jest kluczowe w zastosowaniach produkcyjnych, gdzie precyzyjne operacje są niezbędne do zapewnienia efektywności. Te cztery stopnie swobody są zgodne z zasadami kinematyki, które definiują ruch ciał sztywnych. Umożliwiają one stworzenie bardziej skomplikowanych i funkcjonalnych systemów robotycznych, które są zdolne do wykonywania różnorodnych zadań w zautomatyzowanej produkcji.
W przypadku podania niewłaściwej liczby stopni swobody, można napotkać kilka kluczowych błędów myślowych. Odpowiedzi sugerujące 1 lub 2 stopnie swobody mogą wynikać z mylnego założenia, że ruchy manipulatora są ze sobą powiązane lub że nie wszystkie rodzaje ruchu są brane pod uwagę. Na przykład, wybór 1 stopnia swobody sugeruje, że manipulator może poruszać się jedynie w jednym kierunku, co jest niezgodne z jego założeniami konstrukcyjnymi. W rzeczywistości, manipulatory są projektowane w taki sposób, aby maksymalizować swoją funkcjonalność poprzez niezależne ruchy, co pozwala na skomplikowane manewry w przestrzeni. Wybór 2 stopni swobody może pochodzić z błędnego postrzegania ruchu jako ograniczonego do prostych trajektorii, co nie uwzględnia pełnej gamy ruchów, które mogą być realizowane przez manipulator. Każdy stopień swobody zwiększa możliwości robota, a ograniczenie się do mniejszej liczby nie uwzględnia pełnych wymagań aplikacji przemysłowych, które często wymagają złożonych i precyzyjnych operacji. Dlatego kluczowe jest zrozumienie, że każdy niezależny ruch dodaje do ogólnej funkcjonalności manipulatora oraz pozwala na osiągnięcie lepszej wydajności w automatyzacji procesów przemysłowych.