Kwalifikacja: ELM.06 - Eksploatacja i programowanie urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
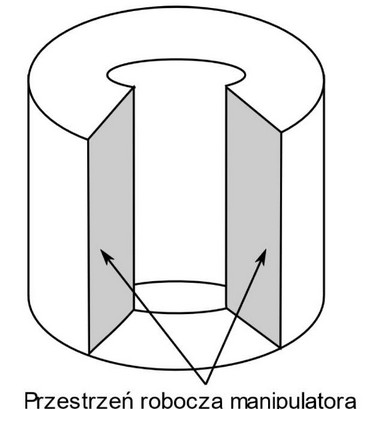
Jaką kinematykę powinien posiadać robot na projektowanym stanowisku montażowym, jeżeli jego efektor będzie musiał operować w przestrzeni roboczej w kształcie niepełnego cylindra?
Odpowiedzi
Informacja zwrotna
Odpowiedź 'RTT' jest poprawna, ponieważ wskazuje na kinematykę, która jest najlepiej dostosowana do operowania w niepełnej cylindrycznej przestrzeni roboczej. Kinematyka ta składa się z jednego stopnia swobody rotacyjnego oraz dwóch translacyjnych. Rotacja umożliwia obrót wokół osi, co jest kluczowe w kontekście montażu lub manipulacji obiektami, które mogą być umieszczone w różnych orientacjach w obrębie tej przestrzeni. Dwa translacyjne stopnie swobody umożliwiają ruch wzdłuż dwóch osiach, co pozwala na precyzyjne umiejscowienie efektora robota w górę, w dół oraz w przód i w tył. Zastosowanie takiej kinematyki jest powszechne w robotyce przemysłowej, gdzie roboty muszą wykonywać złożone operacje w ograniczonej przestrzeni, często wymagając elastyczności oraz precyzji. W praktyce, kinematyka RTT jest stosowana w aplikacjach takich jak montaż, spawanie i pakowanie, gdzie dynamika ruchu i zdolność do precyzyjnego dostępu do różnych punktów w przestrzeni roboczej są kluczowe.
Wybór kinematyki, która nie odpowiada wymaganiom przestrzeni roboczej w kształcie niepełnego cylindra, prowadzi do ograniczeń w funkcjonalności robota. Kinematyka RRR, z trzema rotacyjnymi stopniami swobody, może wydawać się atrakcyjna z perspektywy możliwości rotacyjnych, jednak nie zapewnia odpowiedniej elastyczności translacyjnej, co jest kluczowe w kontekście przestrzeni cylindrycznej. Brak translacji ogranicza zdolność robota do precyzyjnego ustawienia się w różnych pozycjach wewnątrz tej przestrzeni, co może prowadzić do problemów z dostępem do konkretnych punktów montażowych. Natomiast TTR, która składa się z translacji w dwóch osiach i rotacji, również nie zaspokaja wymagań, ponieważ nie zapewnia wystarczającej rotacyjnej kontroli nad efektem, co jest niezbędne podczas pracy w wąskich, cylindrycznych przestrzeniach. Kinematyka TTT, mimo że oferuje trzy translacyjne stopnie swobody, nie zapewnia rotacji, co ogranicza zdolność do dostosowania się do zmieniających się orientacji elementów w przestrzeni. Wybierając niewłaściwą kinematykę, można napotkać poważne problemy z precyzją i elastycznością operacyjną robota, co jest niezgodne z najlepszymi praktykami inżynierii robotycznej, która kładzie nacisk na dostosowanie rozwiązania do specyfiki zadań i przestrzeni roboczej.