Kwalifikacja: ELM.03 - Montaż, uruchamianie i konserwacja urządzeń i systemów mechatronicznych
Zawód: Technik mechatronik
Kategorie: Układy mechatroniczne Sterowanie i programowanie
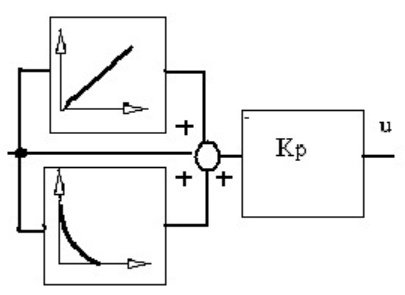
Przedstawiony na rysunku układ jest symbolem regulatora typu
Odpowiedzi
Informacja zwrotna
Regulator PID, którym jest prezentowany na rysunku, składa się z trzech kluczowych elementów: proporcjonalnego (P), całkującego (I) oraz różniczkującego (D). Każdy z tych składników odgrywa istotną rolę w osiągnięciu stabilności i szybkości reakcji w systemach regulacji. Część proporcjonalna odpowiada za dostosowanie wyjścia regulatora wprost proporcjonalnie do błędu, co pozwala na szybkie reagowanie na zmiany. Część całkująca zbiera błąd w czasie, eliminując błąd ustalony i stabilizując system, natomiast część różniczkująca przewiduje przyszłe zmiany błędu, co pozwala na szybsze dostosowanie wyjścia regulatora. Przykłady zastosowania regulatora PID obejmują aplikacje w automatyce przemysłowej, gdzie precyzyjne kontrolowanie temperatury, ciśnienia czy prędkości jest kluczowe. W praktyce stosowanie regulatora PID zgodnie z dobrymi praktykami inżynieryjnymi wymaga odpowiedniego dostrojenia wartości współczynników Kp, Ki, Kd, co można osiągnąć poprzez różne metody, takie jak metoda Zieglera-Nicholsa czy symulacje komputerowe. Poprawne zrozumienie działania regulatora PID jest niezbędne dla inżynierów i techników pracujących w dziedzinie automatyki oraz kontroli procesów.